通过可微分物理学习基于视觉的敏捷飞行
IF 23.9
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
摘要
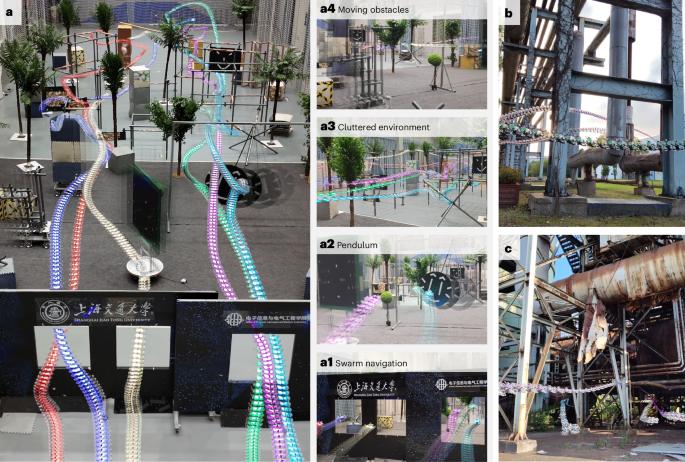
自主空中机器人群有望带来革命性的应用,从行星探索到复杂环境中的搜索和救援。然而,在没有笨重的传感器、繁重的计算或机器人之间的持续通信的情况下,在未知和混乱的空间中有效地导航这些群体仍然是一个主要的研究问题。本文介绍了一种端到端方法,该方法将深度学习与第一性原理物理相结合,通过可微分模拟,使多个空中机器人能够在复杂环境中高速自主导航。我们的方法通过简单的点-质量物理模型对机器人进行模拟,通过反向传播损失梯度直接优化神经网络控制策略。尽管如此简单,我们的方法在多代理和单代理应用程序中都很出色。在多智能体场景中,我们的系统展示了自组织行为,无需通信或集中规划即可实现自主协调。在单智能体场景中,我们的系统在复杂未知环境中导航的成功率达到90%,并且与之前最先进的方法相比,显示出增强的鲁棒性。该系统可以在不需要状态估计的情况下运行,并能适应动态障碍。在真实的森林环境中,它的导航速度高达20米/秒,是之前基于模仿学习的解决方案的两倍。值得注意的是,所有这些功能都部署在预算友好的21美元计算机上,其成本不到现有系统中使用的配备gpu的主板的5%。本文章由计算机程序翻译,如有差异,请以英文原文为准。

Learning vision-based agile flight via differentiable physics
Autonomous aerial robot swarms promise transformative applications, from planetary exploration to search and rescue in complex environments. However, navigating these swarms efficiently in unknown and cluttered spaces without bulky sensors, heavy computation or constant communication between robots remains a major research problem. This paper introduces an end-to-end approach that combines deep learning with first-principles physics through differentiable simulation to enable autonomous navigation by several aerial robots through complex environments at high speed. Our approach directly optimizes a neural network control policy by backpropagating loss gradients through the robot simulation using a simple point-mass physics model. Despite this simplicity, our method excels in both multi-agent and single-agent applications. In multi-agent scenarios, our system demonstrates self-organized behaviour, which enables autonomous coordination without communication or centralized planning. In single-agent scenarios, our system achieved a 90% success rate in navigating through complex unknown environments and demonstrated enhanced robustness compared to previous state-of-the-art approaches. Our system can operate without state estimation and adapt to dynamic obstacles. In real-world forest environments, it navigates at speeds of up to 20 m s−1, doubling the speed of previous imitation-learning-based solutions. Notably, all these capabilities are deployed on a budget-friendly US$21 computer, which costs less than 5% of the GPU-equipped board used in existing systems. Zhang et al. present a differentiable-physics simulation approach that enables autonomous aerial robot swarms to navigate complex environments. High-speed navigation and robust performance in both multi-agent and single-agent scenarios are demonstrated with low-cost hardware platforms.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Nature Machine Intelligence
Multiple-
CiteScore
36.90
自引率
2.10%
发文量
127
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


