在机器人手中嵌入高分辨率触觉,可以实现自适应的人类抓取
IF 23.9
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
摘要
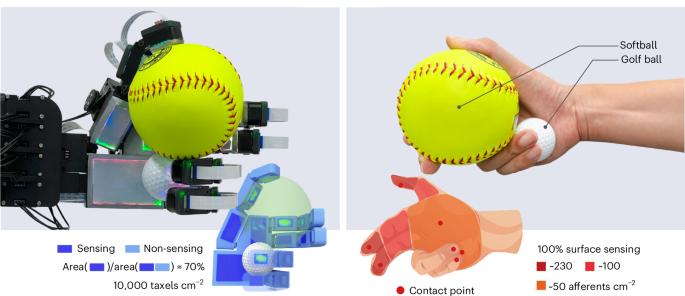
开发适应现实世界动态的机械手仍然是机器人和机器智能领域的一个基本挑战。尽管在复制人手运动学和控制算法方面取得了显著进展,但机器人系统仍然难以在动态环境中与人的能力相匹配,主要原因是触觉反馈不足。为了弥补这一差距,我们提出了F-TAC手,这是一种具有高分辨率触觉传感(0.1毫米空间分辨率)的仿生手,其表面积占70%。通过优化的手部设计,我们克服了集成高分辨率触觉传感器的传统挑战,同时保持了全范围的运动。这只手由我们的生成算法提供动力,该算法综合了类似人的手的结构,在动态的现实世界条件下展示了强大的抓取能力。对600个真实世界试验的广泛评估表明,在复杂的操作任务中,这种触觉体现系统显著优于非触觉知情的替代方案(P < 0.0001)。这些结果为丰富的触觉体现在发展先进机器人智能中的关键作用提供了经验证据,为物理感知能力和智能行为之间的关系提供了有希望的视角。本文章由计算机程序翻译,如有差异,请以英文原文为准。

Embedding high-resolution touch across robotic hands enables adaptive human-like grasping
Developing robotic hands that adapt to real-world dynamics remains a fundamental challenge in robotics and machine intelligence. Despite notable advances in replicating human-hand kinematics and control algorithms, robotic systems still struggle to match human capabilities in dynamic environments, primarily due to inadequate tactile feedback. To bridge this gap, we present F-TAC Hand, a biomimetic hand featuring high-resolution tactile sensing (0.1-mm spatial resolution) across 70% of its surface area. Through optimized hand design, we overcome traditional challenges in integrating high-resolution tactile sensors while preserving the full range of motion. The hand, powered by our generative algorithm that synthesizes human-like hand configurations, demonstrates robust grasping capabilities in dynamic real-world conditions. Extensive evaluation across 600 real-world trials demonstrates that this tactile-embodied system significantly outperforms non-tactile-informed alternatives in complex manipulation tasks (P < 0.0001). These results provide empirical evidence for the critical role of rich tactile embodiment in developing advanced robotic intelligence, offering promising perspectives on the relationship between physical sensing capabilities and intelligent behaviour. Developing robotic hands that can adapt to real-world dynamics remains a substantial challenge. The authors present an AI system that mimics human-like grasping using full-hand tactile sensing and a sensory–motor feedback mechanism.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Nature Machine Intelligence
Multiple-
CiteScore
36.90
自引率
2.10%
发文量
127
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


