利用递归神经网络算法在全球定位系统中断时应用动态传递对准方法
IF 8
2区 计算机科学
Q1 AUTOMATION & CONTROL SYSTEMS
Engineering Applications of Artificial Intelligence
Pub Date : 2025-06-06
DOI:10.1016/j.engappai.2025.111167
引用次数: 0
摘要
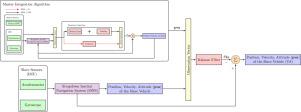
本文提出了一种基于多层神经网络(RTA-NN)的鲁棒运动传递对准方法,用于在主车GPS数据不可用的情况下,基于捷联惯导系统(SINS)和全球定位系统(GPS)组合导航结构对从车的初始信息进行校正。为此,首先基于低阶惯性测量单元(IMU)提取主飞行器的SINS方程,计算主飞行器的位置、速度和姿态;然后,利用闭环卡尔曼滤波结构估计GPS接收机存在时主车辆的真实状态;然后,利用多层长短期记忆(LSTM)和多层感知器组成的深度神经网络,根据主车IMU和捷联惯导输出的当前和过去样本,建立主车的速度模型。最后,将无人水面航行器(USV)的导航单元作为主导航单元,将遥控航行器(ROV)的导航单元作为从导航单元,对所提方法的性能进行了评估。实验结果表明,在GPS信号被干扰的情况下,基于神经网络的传递对准方法是有效的。在GPS中断100秒的情况下,该方法将导航误差降低0.1%,证明了RTA-NN方法在没有GPS的情况下保持可靠传输对准的鲁棒性和准确性。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Applied an in-motion transfer alignment approach during global positioning system outages utilizing a recurrent neural network algorithm
In this study, a Robust in-motion Transfer Alignment method based on the multilayer Neural Network, called RTA-NN, is proposed to correct the initial information of the slave vehicle based on the Strapdown Inertial Navigation System (SINS) and Global Positioning System (GPS) integrated navigation structure of the master vehicle, when the GPS data of the master vehicle is not available. For this purpose, first, the SINS equations of the master vehicle are extracted based on the low-grade Inertial Measurement Units (IMU) to compute the position, velocity, and attitude of the master vehicle. Then, a closed loop Kalman Filter structure is utilized to estimate the true states of the master vehicle in the presence of the GPS receiver. Next, a deep neural network, including multilayer Long-Short Term Memory (LSTM) and multilayer perceptron, is utilized to build the velocity model for the master vehicle based on the current and past samples of the master’s IMU and the SINS outputs. Finally, the performance of the proposed approach is evaluated on the navigation units of the Unmanned Surface Vehicle (USV), considered as master, and Remotely Operated Vehicle (ROV), considered as slave. The results demonstrate the effectiveness of the proposed transfer alignment approach based on the neural network, when the GPS signals are disrupted. During 100-second GPS outages, the proposed method reduces navigation errors by 0.1%, demonstrating the robustness and accuracy of the RTA-NN approach in maintaining reliable transfer alignment without GPS.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Engineering Applications of Artificial Intelligence
工程技术-工程:电子与电气
CiteScore
9.60
自引率
10.00%
发文量
505
审稿时长
68 days
期刊介绍:
Artificial Intelligence (AI) is pivotal in driving the fourth industrial revolution, witnessing remarkable advancements across various machine learning methodologies. AI techniques have become indispensable tools for practicing engineers, enabling them to tackle previously insurmountable challenges. Engineering Applications of Artificial Intelligence serves as a global platform for the swift dissemination of research elucidating the practical application of AI methods across all engineering disciplines. Submitted papers are expected to present novel aspects of AI utilized in real-world engineering applications, validated using publicly available datasets to ensure the replicability of research outcomes. Join us in exploring the transformative potential of AI in engineering.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


