一种基于多层特征的稀疏点云到CAD模型映射方法
IF 1.7
4区 计算机科学
Q3 COMPUTER SCIENCE, SOFTWARE ENGINEERING
引用次数: 0
摘要
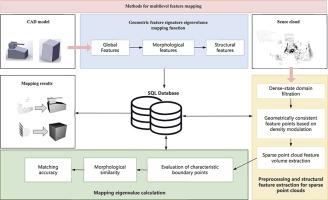
稀疏点云到CAD模型的精确映射在数字孪生、三维重建和工程设计等领域变得越来越重要。然而,通过激光雷达扫描获得的点云数据的稀疏性和不规则性给特征映射精度和与CAD模型的无缝集成带来了重大挑战。传统的方法很难保持精确的映射,特别是在处理复杂的点云场景或稀疏数据时。这些方法在将稀疏点云精确映射到实体模型方面存在明显的局限性。为了解决这些挑战,本文引入了一种多层特征映射方法,该方法对CAD模型和点云数据的几何特征进行了深入分析,显著提高了特征匹配的精度。在CAD模型处理中,利用几何特征签名(Geometric Feature Signature, GFS)映射函数,通过对几何特征量的综合提取,实现高精度的几何形态描述。对于点云数据处理,采用密集域滤波(DDF)优化空间分布,最大限度地减少噪声和冗余数据的影响。该方法结合密度控制几何一致特征提取(DC-GCFE),通过对稀疏点云的几何特征量进行综合分析,实现了关键特征点的精确提取。该方法通过将CAD模型的几何特征与点云的局部和全局特征有效匹配,保证了在稀疏和复杂点云环境下的精确映射,为虚拟仿真和设计优化提供了有力的支持。与传统方法相比,该方法在捕获复杂细节和处理缺失特征方面表现出色。最后,实验验证了该方法在复杂场景下具有较高的匹配精度和鲁棒性,验证了该方法在稀疏点云到CAD模型精确映射中的有效性。本文章由计算机程序翻译,如有差异,请以英文原文为准。
A multilevel feature-based method for mapping sparse point clouds to CAD models
Accurate mapping of sparse point clouds to CAD models is becoming increasingly crucial in fields such as digital twinning, 3D reconstruction, and engineering design. However, the sparsity and irregularity of point cloud data obtained through LiDAR scanning pose significant challenges to feature mapping precision and seamless integration with CAD models. Traditional methods struggle to maintain accurate mapping, especially when dealing with complex point cloud scenes or sparse data. These methods have significant limitations in accurately mapping sparse point clouds to solid models. To address these challenges, this paper introduces a multilevel feature mapping method that thoroughly analyzes the geometric features of both CAD models and point cloud data, significantly improving feature matching accuracy. In CAD model processing, the Geometric Feature Signature (GFS) mapping function is used to achieve high-precision geometric morphology descriptions through comprehensive extraction of geometric feature quantities. For point cloud data processing, Dense Domain Filtering (DDF) is employed to optimize the spatial distribution, minimizing the impact of noise and redundant data. Combined with Density-Controlled Geometric Consistent Feature Extraction (DC-GCFE), this method achieves accurate key feature point extraction from sparse point clouds by analyzing geometric feature quantities comprehensively. By efficiently matching the CAD model's geometric features with the point cloud's local and global features, the proposed multilevel feature mapping method ensures precise mapping even in sparse and complex point cloud environments, offering strong support for virtual simulation and design optimization. In comparison with traditional methods, this approach excels at capturing complex details and handling missing features. Finally, experimental validation confirms the method's high matching accuracy and robustness in complex scenes, verifying its effectiveness in precisely mapping sparse point clouds to CAD models.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Computer Aided Geometric Design
工程技术-计算机:软件工程
CiteScore
3.50
自引率
13.30%
发文量
57
审稿时长
60 days
期刊介绍:
The journal Computer Aided Geometric Design is for researchers, scholars, and software developers dealing with mathematical and computational methods for the description of geometric objects as they arise in areas ranging from CAD/CAM to robotics and scientific visualization. The journal publishes original research papers, survey papers and with quick editorial decisions short communications of at most 3 pages. The primary objects of interest are curves, surfaces, and volumes such as splines (NURBS), meshes, subdivision surfaces as well as algorithms to generate, analyze, and manipulate them. This journal will report on new developments in CAGD and its applications, including but not restricted to the following:
-Mathematical and Geometric Foundations-
Curve, Surface, and Volume generation-
CAGD applications in Numerical Analysis, Computational Geometry, Computer Graphics, or Computer Vision-
Industrial, medical, and scientific applications.
The aim is to collect and disseminate information on computer aided design in one journal. To provide the user community with methods and algorithms for representing curves and surfaces. To illustrate computer aided geometric design by means of interesting applications. To combine curve and surface methods with computer graphics. To explain scientific phenomena by means of computer graphics. To concentrate on the interaction between theory and application. To expose unsolved problems of the practice. To develop new methods in computer aided geometry.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


