{"title":"基于强化学习的混合交通风险感知行人行为研究","authors":"Cheng-En Cai, Sai-Keung Wong, Tzu-Yu Chen","doi":"10.1002/cav.70031","DOIUrl":null,"url":null,"abstract":"<div>\n \n <p>This paper introduces a reinforcement learning method to simulate agents crossing roads in unsignalized, mixed-traffic environments. These agents represent individual pedestrians or small groups. The method ensures that agents adopt safe interactions with nearby dynamic obstacles (bikes, motorcycles, or cars) by considering factors such as conflict zones and post-encroachment times. Risk assessments based on interaction times encourage agents to avoid hazardous behaviors. Additionally, risk-informed reward terms incentivize agents to perform safe actions, while collision penalties deter collisions. The method achieved collision-free crossings and demonstrated normal, conservative, and aggressive pedestrian behaviors in various scenarios. Finally, ablation tests revealed the impact of reward weights, reward terms, and key agent state components. The weights of reward terms can be adjusted to achieve either conservative or aggressive pedestrian crossing behaviors, balancing road crossing efficiency and safety.</p>\n </div>","PeriodicalId":50645,"journal":{"name":"Computer Animation and Virtual Worlds","volume":"36 3","pages":""},"PeriodicalIF":1.7000,"publicationDate":"2025-05-25","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Risk-Aware Pedestrian Behavior Using Reinforcement Learning in Mixed Traffic\",\"authors\":\"Cheng-En Cai, Sai-Keung Wong, Tzu-Yu Chen\",\"doi\":\"10.1002/cav.70031\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div>\\n \\n <p>This paper introduces a reinforcement learning method to simulate agents crossing roads in unsignalized, mixed-traffic environments. These agents represent individual pedestrians or small groups. The method ensures that agents adopt safe interactions with nearby dynamic obstacles (bikes, motorcycles, or cars) by considering factors such as conflict zones and post-encroachment times. Risk assessments based on interaction times encourage agents to avoid hazardous behaviors. Additionally, risk-informed reward terms incentivize agents to perform safe actions, while collision penalties deter collisions. The method achieved collision-free crossings and demonstrated normal, conservative, and aggressive pedestrian behaviors in various scenarios. Finally, ablation tests revealed the impact of reward weights, reward terms, and key agent state components. The weights of reward terms can be adjusted to achieve either conservative or aggressive pedestrian crossing behaviors, balancing road crossing efficiency and safety.</p>\\n </div>\",\"PeriodicalId\":50645,\"journal\":{\"name\":\"Computer Animation and Virtual Worlds\",\"volume\":\"36 3\",\"pages\":\"\"},\"PeriodicalIF\":1.7000,\"publicationDate\":\"2025-05-25\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Computer Animation and Virtual Worlds\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/cav.70031\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"COMPUTER SCIENCE, SOFTWARE ENGINEERING\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Computer Animation and Virtual Worlds","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/cav.70031","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"COMPUTER SCIENCE, SOFTWARE ENGINEERING","Score":null,"Total":0}
Risk-Aware Pedestrian Behavior Using Reinforcement Learning in Mixed Traffic
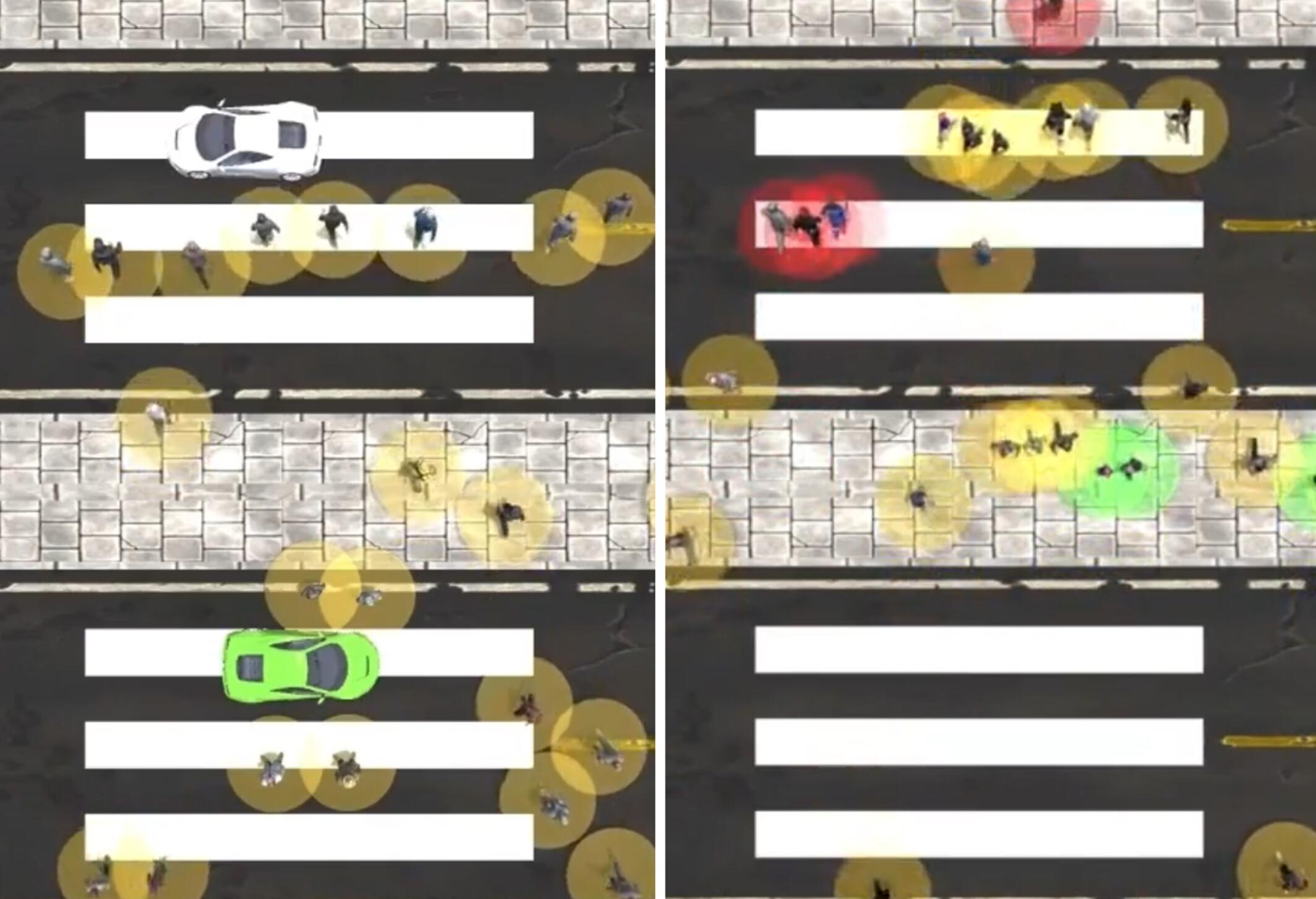
This paper introduces a reinforcement learning method to simulate agents crossing roads in unsignalized, mixed-traffic environments. These agents represent individual pedestrians or small groups. The method ensures that agents adopt safe interactions with nearby dynamic obstacles (bikes, motorcycles, or cars) by considering factors such as conflict zones and post-encroachment times. Risk assessments based on interaction times encourage agents to avoid hazardous behaviors. Additionally, risk-informed reward terms incentivize agents to perform safe actions, while collision penalties deter collisions. The method achieved collision-free crossings and demonstrated normal, conservative, and aggressive pedestrian behaviors in various scenarios. Finally, ablation tests revealed the impact of reward weights, reward terms, and key agent state components. The weights of reward terms can be adjusted to achieve either conservative or aggressive pedestrian crossing behaviors, balancing road crossing efficiency and safety.
期刊介绍:
With the advent of very powerful PCs and high-end graphics cards, there has been an incredible development in Virtual Worlds, real-time computer animation and simulation, games. But at the same time, new and cheaper Virtual Reality devices have appeared allowing an interaction with these real-time Virtual Worlds and even with real worlds through Augmented Reality. Three-dimensional characters, especially Virtual Humans are now of an exceptional quality, which allows to use them in the movie industry. But this is only a beginning, as with the development of Artificial Intelligence and Agent technology, these characters will become more and more autonomous and even intelligent. They will inhabit the Virtual Worlds in a Virtual Life together with animals and plants.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


