{"title":"协同轨迹规划中人机交互通信的考虑。","authors":"Julian Schneider, Balint Varga, Sören Hohmann","doi":"10.3389/frobt.2025.1568402","DOIUrl":null,"url":null,"abstract":"<p><p>Interactive human-machine systems aim to significantly enhance performance and reduce human workload by leveraging the combined strengths of humans and automated systems. In the state of the art, human-machine cooperation (HMC) systems are modeled in various interaction layers, e.g., the decision layer, trajectory layer, and action layer. The literature usually focuses on the action layer, assuming that there is no need for a consensus at the decision or trajectory layers. Only few studies deal with the interaction at the trajectory layer. None of the previous work has systematically examined the structure of communication for interaction between humans and machines beyond the action layer. Therefore, this paper proposes a graph representation based on a multi-agent system theory for human-machine cooperation. For this purpose, a layer model for human-machine cooperation from the literature is converted into a graph representation. Using our novel graph representation, the existence of communication loops can be demonstrated, which are necessary for emancipated cooperation. In contrast, a leader-follower structure does not possess a closed loop in this graph representation. The choice of the communication loop for emancipated cooperation is ambiguous and can take place via various closed loops at higher layers of human-machine interactions, which open new possibilities for the design of emancipated cooperative control systems. In a simulation, it is shown that emancipated cooperation is possible via three variants of communication loops and that a consensus on a common trajectory is found in each case. The results indicate that taking into account cooperative strategies at the trajectory layer can enhance the performance and effectiveness of human-machine systems.</p>","PeriodicalId":47597,"journal":{"name":"Frontiers in Robotics and AI","volume":"12 ","pages":"1568402"},"PeriodicalIF":3.0000,"publicationDate":"2025-05-06","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12089044/pdf/","citationCount":"0","resultStr":"{\"title\":\"Consideration of communication in human-machine interaction for cooperative trajectory planning.\",\"authors\":\"Julian Schneider, Balint Varga, Sören Hohmann\",\"doi\":\"10.3389/frobt.2025.1568402\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Interactive human-machine systems aim to significantly enhance performance and reduce human workload by leveraging the combined strengths of humans and automated systems. In the state of the art, human-machine cooperation (HMC) systems are modeled in various interaction layers, e.g., the decision layer, trajectory layer, and action layer. The literature usually focuses on the action layer, assuming that there is no need for a consensus at the decision or trajectory layers. Only few studies deal with the interaction at the trajectory layer. None of the previous work has systematically examined the structure of communication for interaction between humans and machines beyond the action layer. Therefore, this paper proposes a graph representation based on a multi-agent system theory for human-machine cooperation. For this purpose, a layer model for human-machine cooperation from the literature is converted into a graph representation. Using our novel graph representation, the existence of communication loops can be demonstrated, which are necessary for emancipated cooperation. In contrast, a leader-follower structure does not possess a closed loop in this graph representation. The choice of the communication loop for emancipated cooperation is ambiguous and can take place via various closed loops at higher layers of human-machine interactions, which open new possibilities for the design of emancipated cooperative control systems. In a simulation, it is shown that emancipated cooperation is possible via three variants of communication loops and that a consensus on a common trajectory is found in each case. The results indicate that taking into account cooperative strategies at the trajectory layer can enhance the performance and effectiveness of human-machine systems.</p>\",\"PeriodicalId\":47597,\"journal\":{\"name\":\"Frontiers in Robotics and AI\",\"volume\":\"12 \",\"pages\":\"1568402\"},\"PeriodicalIF\":3.0000,\"publicationDate\":\"2025-05-06\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12089044/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Robotics and AI\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.3389/frobt.2025.1568402\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q2\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Robotics and AI","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3389/frobt.2025.1568402","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
Consideration of communication in human-machine interaction for cooperative trajectory planning.
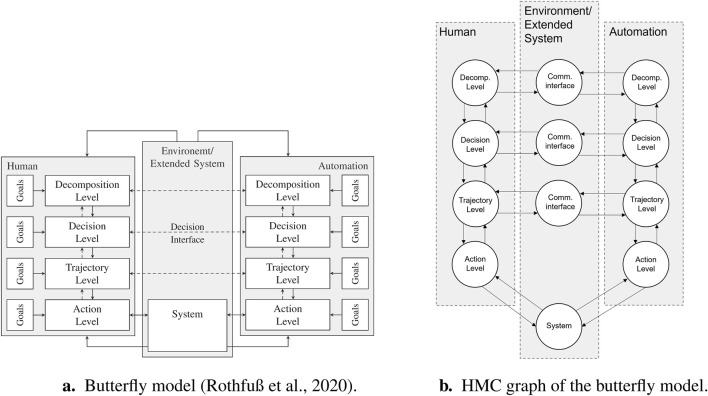
Interactive human-machine systems aim to significantly enhance performance and reduce human workload by leveraging the combined strengths of humans and automated systems. In the state of the art, human-machine cooperation (HMC) systems are modeled in various interaction layers, e.g., the decision layer, trajectory layer, and action layer. The literature usually focuses on the action layer, assuming that there is no need for a consensus at the decision or trajectory layers. Only few studies deal with the interaction at the trajectory layer. None of the previous work has systematically examined the structure of communication for interaction between humans and machines beyond the action layer. Therefore, this paper proposes a graph representation based on a multi-agent system theory for human-machine cooperation. For this purpose, a layer model for human-machine cooperation from the literature is converted into a graph representation. Using our novel graph representation, the existence of communication loops can be demonstrated, which are necessary for emancipated cooperation. In contrast, a leader-follower structure does not possess a closed loop in this graph representation. The choice of the communication loop for emancipated cooperation is ambiguous and can take place via various closed loops at higher layers of human-machine interactions, which open new possibilities for the design of emancipated cooperative control systems. In a simulation, it is shown that emancipated cooperation is possible via three variants of communication loops and that a consensus on a common trajectory is found in each case. The results indicate that taking into account cooperative strategies at the trajectory layer can enhance the performance and effectiveness of human-machine systems.
期刊介绍:
Frontiers in Robotics and AI publishes rigorously peer-reviewed research covering all theory and applications of robotics, technology, and artificial intelligence, from biomedical to space robotics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


