ZhiYong Yang, Wang Tian, HaoYang Wang, Xu Liu, DaoDe Zhang, Yu Yan, ShaoSheng Fan
{"title":"基于改进蒙特卡罗法的蛇形机器人工作空间求解方法。","authors":"ZhiYong Yang, Wang Tian, HaoYang Wang, Xu Liu, DaoDe Zhang, Yu Yan, ShaoSheng Fan","doi":"10.1155/abb/6125695","DOIUrl":null,"url":null,"abstract":"<p><p>The method is applicable for solving the obstacle avoidance workspace of a snake-like robot working on high-voltage transmission cables, based on an improved Monte Carlo method, to address the issues of uneven distribution of scattered points, difficulty in extracting point cloud boundaries, and insufficient accuracy in traditional Monte Carlo methods. The proposed method first generates a seed workspace for the snake-like robot using traditional Monte Carlo method and then envelops the seed workspace with a cube and divides it into several smaller cubes that contain points in the workspace equally. Next, Gaussian distribution probability density function is used to extend and sample the seed workspace of the robot, generating the workspace of the snake-like robot. Finally, the <i>α</i> - shape algorithm is used to extract the point cloud boundaries of the snake-like robot workspace and calculate its volume, accurately determining the workspace. Simulation experiments comparing the reconstructed surface obtained from the <i>α</i> - shape algorithm with the point cloud of the snake-like robot workspace show high accuracy.</p>","PeriodicalId":8029,"journal":{"name":"Applied Bionics and Biomechanics","volume":"2025 ","pages":"6125695"},"PeriodicalIF":0.6000,"publicationDate":"2025-03-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11991773/pdf/","citationCount":"0","resultStr":"{\"title\":\"Snake-Like Robot Workspace Solving Method Based on Improved Monte Carlo Method.\",\"authors\":\"ZhiYong Yang, Wang Tian, HaoYang Wang, Xu Liu, DaoDe Zhang, Yu Yan, ShaoSheng Fan\",\"doi\":\"10.1155/abb/6125695\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>The method is applicable for solving the obstacle avoidance workspace of a snake-like robot working on high-voltage transmission cables, based on an improved Monte Carlo method, to address the issues of uneven distribution of scattered points, difficulty in extracting point cloud boundaries, and insufficient accuracy in traditional Monte Carlo methods. The proposed method first generates a seed workspace for the snake-like robot using traditional Monte Carlo method and then envelops the seed workspace with a cube and divides it into several smaller cubes that contain points in the workspace equally. Next, Gaussian distribution probability density function is used to extend and sample the seed workspace of the robot, generating the workspace of the snake-like robot. Finally, the <i>α</i> - shape algorithm is used to extract the point cloud boundaries of the snake-like robot workspace and calculate its volume, accurately determining the workspace. Simulation experiments comparing the reconstructed surface obtained from the <i>α</i> - shape algorithm with the point cloud of the snake-like robot workspace show high accuracy.</p>\",\"PeriodicalId\":8029,\"journal\":{\"name\":\"Applied Bionics and Biomechanics\",\"volume\":\"2025 \",\"pages\":\"6125695\"},\"PeriodicalIF\":0.6000,\"publicationDate\":\"2025-03-09\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11991773/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Applied Bionics and Biomechanics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1155/abb/6125695\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Applied Bionics and Biomechanics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1155/abb/6125695","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
Snake-Like Robot Workspace Solving Method Based on Improved Monte Carlo Method.
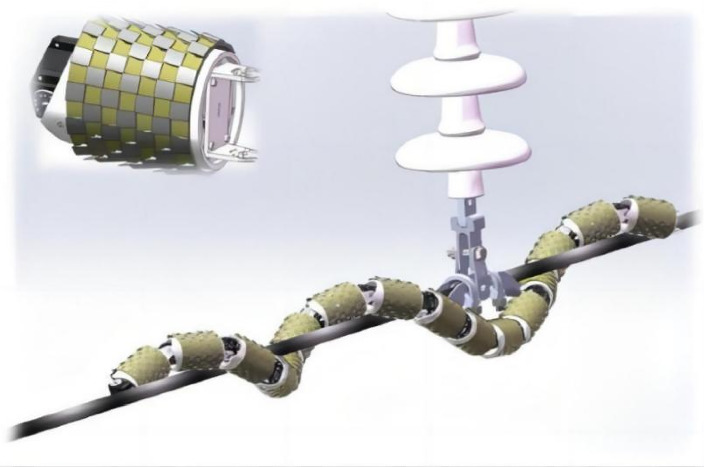
The method is applicable for solving the obstacle avoidance workspace of a snake-like robot working on high-voltage transmission cables, based on an improved Monte Carlo method, to address the issues of uneven distribution of scattered points, difficulty in extracting point cloud boundaries, and insufficient accuracy in traditional Monte Carlo methods. The proposed method first generates a seed workspace for the snake-like robot using traditional Monte Carlo method and then envelops the seed workspace with a cube and divides it into several smaller cubes that contain points in the workspace equally. Next, Gaussian distribution probability density function is used to extend and sample the seed workspace of the robot, generating the workspace of the snake-like robot. Finally, the α - shape algorithm is used to extract the point cloud boundaries of the snake-like robot workspace and calculate its volume, accurately determining the workspace. Simulation experiments comparing the reconstructed surface obtained from the α - shape algorithm with the point cloud of the snake-like robot workspace show high accuracy.
期刊介绍:
Applied Bionics and Biomechanics publishes papers that seek to understand the mechanics of biological systems, or that use the functions of living organisms as inspiration for the design new devices. Such systems may be used as artificial replacements, or aids, for their original biological purpose, or be used in a different setting altogether.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


