{"title":"基于量化图像的ORB-SLAM3性能评价","authors":"Siyuan Tao, Yuki Minami, Masato Ishikawa","doi":"10.1007/s10015-025-01006-4","DOIUrl":null,"url":null,"abstract":"<div><p>Visual simultaneous localization and mapping (SLAM) is a critical technology for robots to perform high-precision navigation, increasing the focus among researchers to improve its accuracy. However, improvements in SLAM accuracy always come at the cost of an increased memory footprint, which limits the long-term operation of devices that operate under constrained hardware resources. Application of quantization methods is proposed as a promising solution to this problem. Since quantization can result in performance degradation, it is crucial to quantitatively evaluate the trade-off between potential degradation and memory savings to assess its practicality for visual SLAM. This paper introduces a mechanism to evaluate the influence of a quantization method on visual SLAM, and applies it to assess the impact of three different quantization methods on ORB-SLAM3. Specifically, we examine two static quantization methods and a dynamic quantization method called error diffusion, which can pseudo-preserve image shading information. The paper contributes to the conclusion that error diffusion, with controlled weight parameters in the error diffusion filter, can suppress degradation and reduce the memory footprint, demonstrating its effectiveness in dynamic environments.</p></div>","PeriodicalId":46050,"journal":{"name":"Artificial Life and Robotics","volume":"30 2","pages":"354 - 363"},"PeriodicalIF":0.8000,"publicationDate":"2025-02-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Performance evaluation of ORB-SLAM3 with quantized images\",\"authors\":\"Siyuan Tao, Yuki Minami, Masato Ishikawa\",\"doi\":\"10.1007/s10015-025-01006-4\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Visual simultaneous localization and mapping (SLAM) is a critical technology for robots to perform high-precision navigation, increasing the focus among researchers to improve its accuracy. However, improvements in SLAM accuracy always come at the cost of an increased memory footprint, which limits the long-term operation of devices that operate under constrained hardware resources. Application of quantization methods is proposed as a promising solution to this problem. Since quantization can result in performance degradation, it is crucial to quantitatively evaluate the trade-off between potential degradation and memory savings to assess its practicality for visual SLAM. This paper introduces a mechanism to evaluate the influence of a quantization method on visual SLAM, and applies it to assess the impact of three different quantization methods on ORB-SLAM3. Specifically, we examine two static quantization methods and a dynamic quantization method called error diffusion, which can pseudo-preserve image shading information. The paper contributes to the conclusion that error diffusion, with controlled weight parameters in the error diffusion filter, can suppress degradation and reduce the memory footprint, demonstrating its effectiveness in dynamic environments.</p></div>\",\"PeriodicalId\":46050,\"journal\":{\"name\":\"Artificial Life and Robotics\",\"volume\":\"30 2\",\"pages\":\"354 - 363\"},\"PeriodicalIF\":0.8000,\"publicationDate\":\"2025-02-07\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Artificial Life and Robotics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10015-025-01006-4\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Artificial Life and Robotics","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.1007/s10015-025-01006-4","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"ROBOTICS","Score":null,"Total":0}
Performance evaluation of ORB-SLAM3 with quantized images
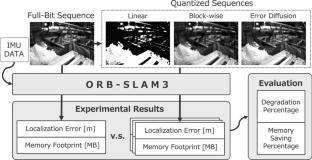
Visual simultaneous localization and mapping (SLAM) is a critical technology for robots to perform high-precision navigation, increasing the focus among researchers to improve its accuracy. However, improvements in SLAM accuracy always come at the cost of an increased memory footprint, which limits the long-term operation of devices that operate under constrained hardware resources. Application of quantization methods is proposed as a promising solution to this problem. Since quantization can result in performance degradation, it is crucial to quantitatively evaluate the trade-off between potential degradation and memory savings to assess its practicality for visual SLAM. This paper introduces a mechanism to evaluate the influence of a quantization method on visual SLAM, and applies it to assess the impact of three different quantization methods on ORB-SLAM3. Specifically, we examine two static quantization methods and a dynamic quantization method called error diffusion, which can pseudo-preserve image shading information. The paper contributes to the conclusion that error diffusion, with controlled weight parameters in the error diffusion filter, can suppress degradation and reduce the memory footprint, demonstrating its effectiveness in dynamic environments.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


