能够连续三维变形和锁定的变形机器
IF 23.9
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
摘要
受自然物种的启发,利用形态变化来实现多种运动模式,各种多模式机器人已经被报道。在同一能量源控制下,具有连续形状变形和锁定能力的小型执行器的开发对于无系绳多模态机器人的小型化至关重要,但目前仍是难以实现的。介绍了一种小型连续变形致动器(CMAs)的协同设计概念,该致动器利用液晶弹性体的精确可编程致动变形,通过电热控制实现形状记忆聚合物的连续形状变形和高刚度变化,从而锁定几何构型。乐高启发的设计策略允许通过合理组装具有不同可访问几何配置范围的基本执行器单元来定制复杂形状的cma(例如,“变压器”,“飞机”和“海龟”)。强大的形状变形和锁定能力,以及cma相对较高的承重能力,允许开发多功能外骨骼,可以集成多种功能组件。独特的小型变形机器的演示,如具有丰富多样的三维几何形状的可变形显示器,能够在“跑车”,“有翼汽车”和“面包车”之间转换的轮式微型机器人,以及轻型无系绳地空微型机器人,表明了广泛的应用范围。本文章由计算机程序翻译,如有差异,请以英文原文为准。
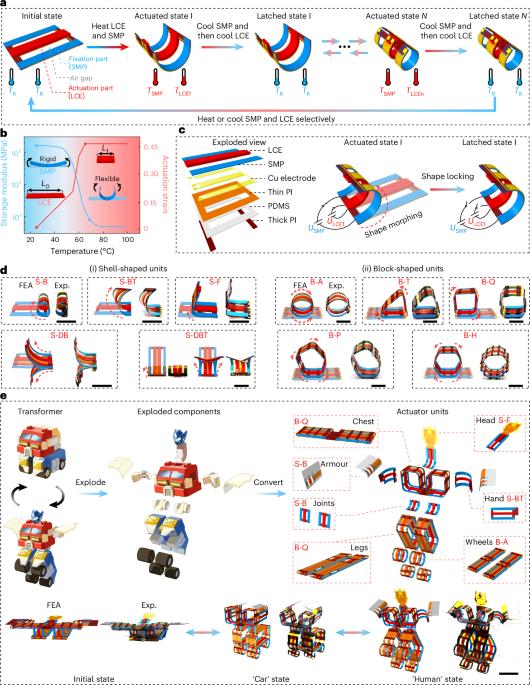

Transforming machines capable of continuous 3D shape morphing and locking
Inspired by natural species that leverage morphological changes to realize multiple locomotion modes, diverse multimodal robots have been reported. While developments of small-scale actuators with continuous shape morphing and locking capabilities controlled by the same energy source are crucial for miniaturization of untethered multimodal robots, it remains elusive. We introduce a synergistic design concept of small-scale continuously morphable actuators (CMAs) that harness precisely programmable actuation deformation of liquid crystal elastomer to achieve continuous shape morphing and high stiffness variation of shape memory polymer to lock geometric configuration, both through electrothermal control. Lego-inspired design strategy allows customized construction of complexly shaped CMAs (for example, ‘transformer’, ‘aircraft’ and ‘turtle’) through rational assembly of elementary actuator units with different ranges of accessible geometric configurations. The powerful shape morphing and locking capabilities, as well as the relatively high load-bearing capacity of the CMAs, allow for developments of versatile exoskeletons that can integrate a diversity of functional components. Demonstrations of unique small-scale transforming machines, such as morphable displays with a rich diversity of three-dimensional geometries, a wheeled microrobot capable of transformation among ‘sports car’, ‘winged car’ and ‘van’, and a lightweight untethered terrestrial–aerial microrobot, suggest a broad spectrum of applications. Continuous shape morphing for small robots can offer advantages, but it is difficult to perform tasks if they are not stiff enough. Xu et al. present here a design combining liquid crystal elastomers and shape memory polymers to lock morphable elements in place.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Nature Machine Intelligence
Multiple-
CiteScore
36.90
自引率
2.10%
发文量
127
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


