Yao Yan, Joseph Páez Chávez, Jiajia Shen, Yang Liu
{"title":"von Mises桁架振动冲击胶囊机器人动力学研究。","authors":"Yao Yan, Joseph Páez Chávez, Jiajia Shen, Yang Liu","doi":"10.1007/s11071-024-10653-4","DOIUrl":null,"url":null,"abstract":"<p><p>Functionalised nonlinear structures employing structural instabilities for rapid response shape-shifting are emerging technologies with a wide range of potential applications. The <i>von Mises</i> truss is a widely employed model for such functionalised nonlinear structures; however, few studies have delved into its functionality when integrated with a complex dynamical system. This paper investigates its efficacy on enhancing the progression speed of a vibration-driven robot, known as the vibro-impact capsule robot, which is a piecewise-smooth dynamical system having abundant coexisting attractors. Bifurcation analysis of the capsule robot integrated with a <i>von Mises</i> truss is conducted for this purpose. Our numerical studies focus on the influence of the frequency and amplitude of the robot's driving force on its progression. Specifically, we compare the periodic responses of both the capsule robots with and without the <i>von Mises</i> truss, utilising the numerical continuation techniques for piecewise-smooth dynamical systems. Our studies confirm the advantage of using the <i>von Mises</i> truss when the driving force of the robot is significantly small. Additionally, we identify an optimal operational regime on the amplitude-frequency control plane, where the maximum robot speed is achieved for a given amount of power consumption. The numerical studies presented in this work provide a promising indication of the advantages offered by the <i>von Mises</i> truss for vibration-driven robots. This research underscores the significant potential of functionalised nonlinear structures to enhance the efficiency of small-scale robots operating under power limitations.</p>","PeriodicalId":19723,"journal":{"name":"Nonlinear Dynamics","volume":"113 10","pages":"11047-11067"},"PeriodicalIF":5.2000,"publicationDate":"2025-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11937207/pdf/","citationCount":"0","resultStr":"{\"title\":\"Dynamics of the vibro-impact capsule robot with a <i>von Mises</i> truss.\",\"authors\":\"Yao Yan, Joseph Páez Chávez, Jiajia Shen, Yang Liu\",\"doi\":\"10.1007/s11071-024-10653-4\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Functionalised nonlinear structures employing structural instabilities for rapid response shape-shifting are emerging technologies with a wide range of potential applications. The <i>von Mises</i> truss is a widely employed model for such functionalised nonlinear structures; however, few studies have delved into its functionality when integrated with a complex dynamical system. This paper investigates its efficacy on enhancing the progression speed of a vibration-driven robot, known as the vibro-impact capsule robot, which is a piecewise-smooth dynamical system having abundant coexisting attractors. Bifurcation analysis of the capsule robot integrated with a <i>von Mises</i> truss is conducted for this purpose. Our numerical studies focus on the influence of the frequency and amplitude of the robot's driving force on its progression. Specifically, we compare the periodic responses of both the capsule robots with and without the <i>von Mises</i> truss, utilising the numerical continuation techniques for piecewise-smooth dynamical systems. Our studies confirm the advantage of using the <i>von Mises</i> truss when the driving force of the robot is significantly small. Additionally, we identify an optimal operational regime on the amplitude-frequency control plane, where the maximum robot speed is achieved for a given amount of power consumption. The numerical studies presented in this work provide a promising indication of the advantages offered by the <i>von Mises</i> truss for vibration-driven robots. This research underscores the significant potential of functionalised nonlinear structures to enhance the efficiency of small-scale robots operating under power limitations.</p>\",\"PeriodicalId\":19723,\"journal\":{\"name\":\"Nonlinear Dynamics\",\"volume\":\"113 10\",\"pages\":\"11047-11067\"},\"PeriodicalIF\":5.2000,\"publicationDate\":\"2025-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11937207/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Nonlinear Dynamics\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s11071-024-10653-4\",\"RegionNum\":2,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/12/8 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MECHANICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nonlinear Dynamics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s11071-024-10653-4","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/12/8 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
Dynamics of the vibro-impact capsule robot with a von Mises truss.
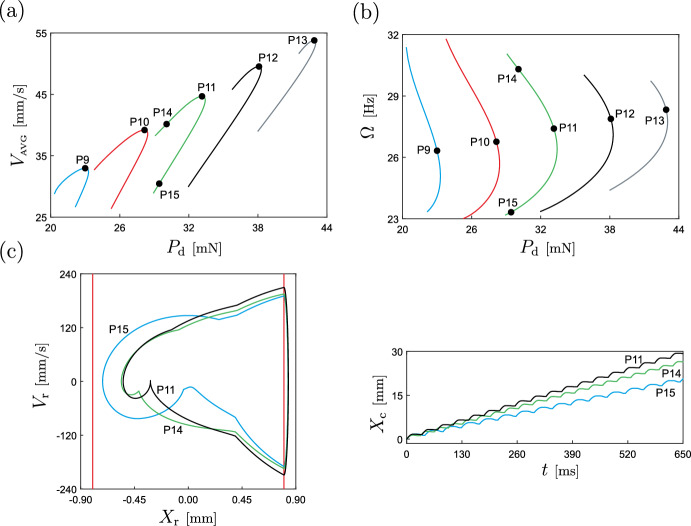
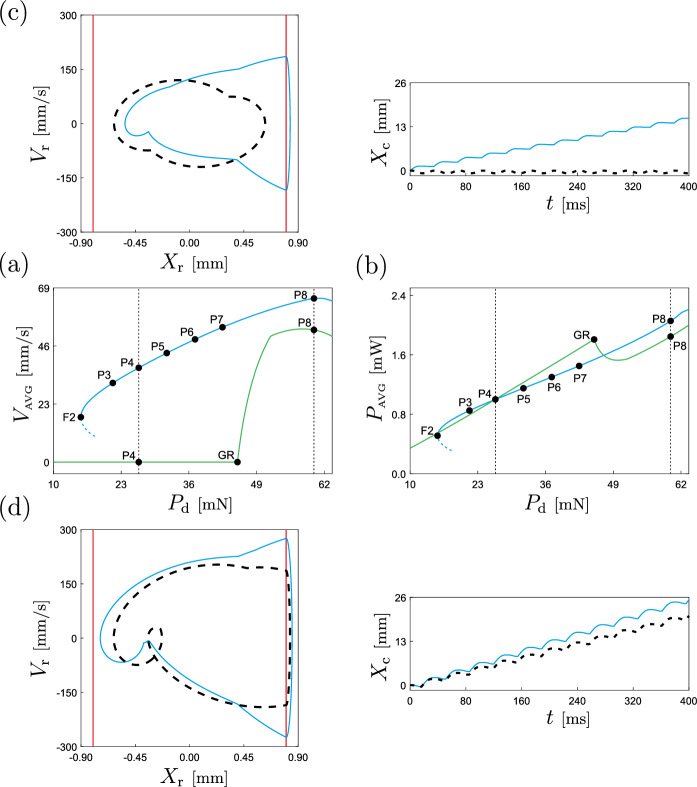
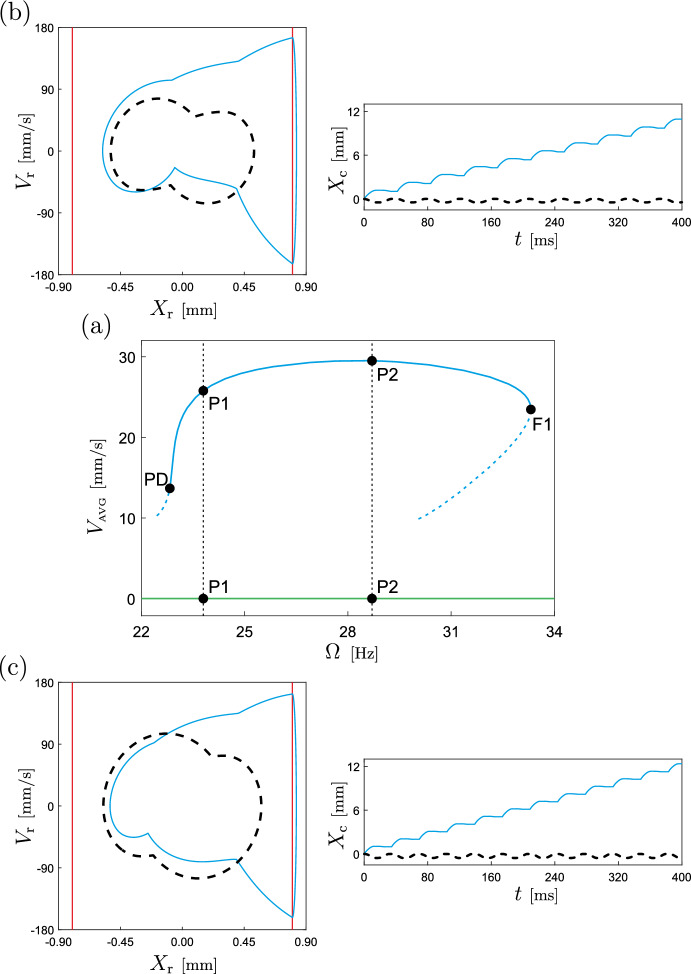
Functionalised nonlinear structures employing structural instabilities for rapid response shape-shifting are emerging technologies with a wide range of potential applications. The von Mises truss is a widely employed model for such functionalised nonlinear structures; however, few studies have delved into its functionality when integrated with a complex dynamical system. This paper investigates its efficacy on enhancing the progression speed of a vibration-driven robot, known as the vibro-impact capsule robot, which is a piecewise-smooth dynamical system having abundant coexisting attractors. Bifurcation analysis of the capsule robot integrated with a von Mises truss is conducted for this purpose. Our numerical studies focus on the influence of the frequency and amplitude of the robot's driving force on its progression. Specifically, we compare the periodic responses of both the capsule robots with and without the von Mises truss, utilising the numerical continuation techniques for piecewise-smooth dynamical systems. Our studies confirm the advantage of using the von Mises truss when the driving force of the robot is significantly small. Additionally, we identify an optimal operational regime on the amplitude-frequency control plane, where the maximum robot speed is achieved for a given amount of power consumption. The numerical studies presented in this work provide a promising indication of the advantages offered by the von Mises truss for vibration-driven robots. This research underscores the significant potential of functionalised nonlinear structures to enhance the efficiency of small-scale robots operating under power limitations.
期刊介绍:
Nonlinear Dynamics provides a forum for the rapid publication of original research in the field. The journal’s scope encompasses all nonlinear dynamic phenomena associated with mechanical, structural, civil, aeronautical, ocean, electrical, and control systems. Review articles and original contributions are based on analytical, computational, and experimental methods.
The journal examines such topics as perturbation and computational methods, symbolic manipulation, dynamic stability, local and global methods, bifurcations, chaos, and deterministic and random vibrations. The journal also investigates Lie groups, multibody dynamics, robotics, fluid-solid interactions, system modeling and identification, friction and damping models, signal analysis, and measurement techniques.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


