根据性能适应度将机器人分类到机器人树中
IF 23.9
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
摘要
机器人通常根据特定的形态特征进行分类,比如它们的运动结构。然而,形态和智能之间复杂的相互作用决定了机器人执行过程的好坏。就像精细的外科手术需要高度的灵活性和触觉精度一样,手工仓库或建筑工作需要力量和耐力。这些工艺要求要求机器人系统提供符合工艺的性能水平。在这项工作中,我们引入了机器人树作为一种分类法,以弥合形态分类和基于过程的性能之间的差距。它根据机器人的适应性对其进行分类,例如,物理交互过程。使用11个工业机械臂,我们基于一组精心推导的指标构建了机器人树的第一部分,这些指标反映了机器人在各种工业物理交互过程中的基本能力。通过显著性分析,我们确定了系统之间的实质性差异,并通过期望最大化算法对它们进行分组,以创建一个基于健康度的机器人分类,该分类对贡献开放且可访问。本文章由计算机程序翻译,如有差异,请以英文原文为准。

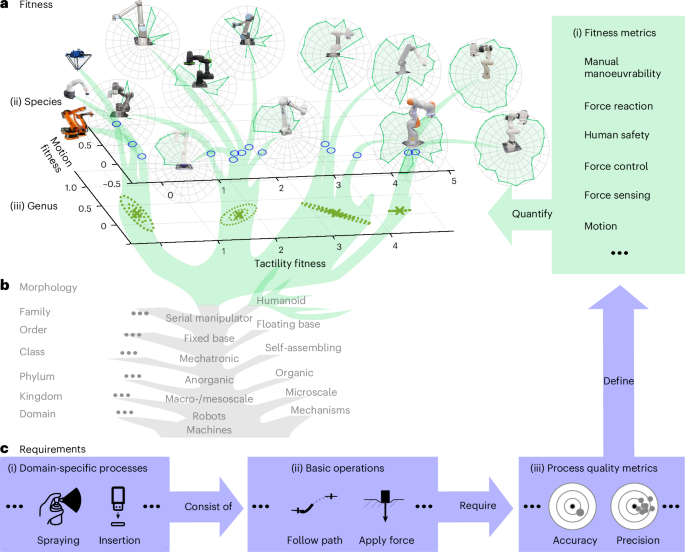
Categorizing robots by performance fitness into the tree of robots
Robots are typically classified based on specific morphological features, like their kinematic structure. However, a complex interplay between morphology and intelligence shapes how well a robot performs processes. Just as delicate surgical procedures demand high dexterity and tactile precision, manual warehouse or construction work requires strength and endurance. These process requirements necessitate robot systems that provide a level of performance fitting the process. In this work, we introduce the tree of robots as a taxonomy to bridge the gap between morphological classification and process-based performance. It classifies robots based on their fitness to perform, for example, physical interaction processes. Using 11 industrial manipulators, we constructed the first part of the tree of robots based on a carefully deduced set of metrics reflecting fundamental robot capabilities for various industrial physical interaction processes. Through significance analysis, we identified substantial differences between the systems, grouping them via an expectation-maximization algorithm to create a fitness-based robot classification that is open for contributions and accessible. It is challenging to compare how well robots perform a task, as the evaluation depends on the process and skills required. It is proposed to group robots into a taxonomy based on their performance on a set of embodied skill benchmarks.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Nature Machine Intelligence
Multiple-
CiteScore
36.90
自引率
2.10%
发文量
127
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


