无图像机器人系统在单室膝关节置换术和前交叉韧带重建中的新应用。
IF 1.4
Q3 ORTHOPEDICS
Asia-Pacific Journal of Sport Medicine Arthroscopy Rehabilitation and Technology
Pub Date : 2025-01-01
DOI:10.1016/j.asmart.2024.12.001
引用次数: 0
摘要
本技术说明探讨了将无图像机器人手术系统用于同时进行单髁膝关节置换术(UKA)和前交叉韧带重建术(ACLR)的新方法。膝关节骨关节炎(OA)和前交叉韧带(ACL)功能不全是常见疾病,传统上需要分别进行治疗。机器人辅助技术的整合提高了手术的精确性,一次手术即可同时解决内侧室 OA 和前交叉韧带损伤问题。我们介绍了一例内侧室骨关节炎和前十字韧带完全断裂的 47 岁患者。患者使用 CORI 手术系统(Smith&Nephew,英国伦敦)同时接受了机器人辅助的 UKA 和 ACLR 手术。这种方法可实现胫骨隧道的精确放置和软组织的精确平衡。机器人系统可进行实时间隙评估和平衡,降低前交叉韧带移植物张力过大或过小的风险。手术采用标准的髌旁内侧入路。关键步骤包括腘绳肌自体移植物采集、股骨和胫骨隧道创建以及机器人辅助植入物定位。术后康复在第三周即可完全负重。该病例是首次报道使用无图像机器人系统同时进行UKA和ACLR手术,凸显了其在标准化和改善复杂膝关节手术效果方面的潜力。本研究未从公共、商业或非营利部门的资助机构获得任何特定资助。本文章由计算机程序翻译,如有差异,请以英文原文为准。

Novel application of an imageless robotic system in simultaneous unicompartmental knee arthroplasty and anterior cruciate ligament reconstruction
This technical note explores the novel use of an imageless robotic surgical system for simultaneous unicompartmental knee arthroplasty (UKA) and anterior cruciate ligament reconstruction (ACLR). Knee osteoarthritis (OA) and anterior cruciate ligament (ACL) insufficiency are common conditions that traditionally require separate management. The integration of robotic assistance offers enhanced precision in surgical procedures, addressing both medial compartment OA and ACL insufficiency in a single operation.
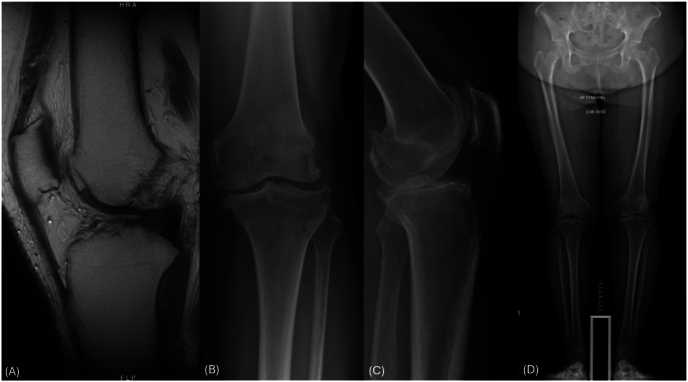
We present a case involving a 47-year-old patient with medial compartment osteoarthritis and complete ACL rupture. The patient underwent a simultaneous robotic-assisted UKA and ACLR using the CORI Surgical System (Smith&Nephew, London, UK). This approach enables accurate tibial tunnel placement and precise soft tissue balancing. The robotic system facilitates real-time gap assessment and balancing, reducing the risk of over- or under-constraint during ACL graft tensioning.
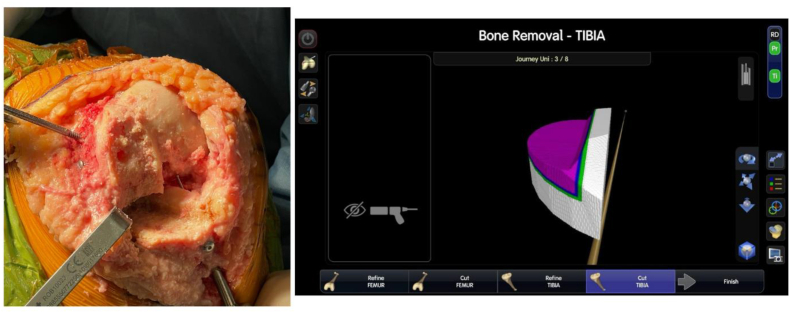
The procedure was performed with a standard medial parapatellar approach. Key steps included hamstring autograft harvesting, femoral and tibial tunnel creation, and robotic-assisted implant positioning. Post-operative rehabilitation allowed full weight-bearing by the third week.
This case represents the first reported instance of using an imageless robotic system for simultaneous UKA and ACLR, highlighting its potential to standardize and improve results in complex knee surgeries.
This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

CiteScore
3.80
自引率
0.00%
发文量
21
审稿时长
98 days
期刊介绍:
The Asia-Pacific Journal of Sports Medicine, Arthroscopy, Rehabilitation and Technology (AP-SMART) is the official peer-reviewed, open access journal of the Asia-Pacific Knee, Arthroscopy and Sports Medicine Society (APKASS) and the Japanese Orthopaedic Society of Knee, Arthroscopy and Sports Medicine (JOSKAS). It is published quarterly, in January, April, July and October, by Elsevier. The mission of AP-SMART is to inspire clinicians, practitioners, scientists and engineers to work towards a common goal to improve quality of life in the international community. The Journal publishes original research, reviews, editorials, perspectives, and letters to the Editor. Multidisciplinary research with collaboration amongst clinicians and scientists from different disciplines will be the trend in the coming decades. AP-SMART provides a platform for the exchange of new clinical and scientific information in the most precise and expeditious way to achieve timely dissemination of information and cross-fertilization of ideas.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


