{"title":"机器人辅助全髋关节置换术中髋臼杯定位的准确性:基于 CT 的评估。","authors":"Ashish Singh, Purushotam Kumar, Kanukuntla Kalyan, Akash Chandrashekar Gundalli, Sudhir Shankar Mane, Himanshu Swarnkar, Lavanya Singh","doi":"10.1051/sicotj/2024057","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Robot-assisted instrumentation during total hip arthroplasty (THA) has the potential to improve acetabular cup positioning. This study aimed to evaluate the precision of robotic-arm-assisted THA (rTHA) and assess whether the system can provide accurate cup positioning comparable to conventional THA (cTHA).</p><p><strong>Methods: </strong>A single-center prospective cohort study consisting of 151 patients who underwent THA (108 rTHA and 43 cTHA). The robotically assisted system was used to match the postoperative computed tomography (CT) image of the pelvis with the planned and intraoperative anatomical landmarks. The cTHA cohort underwent hip replacement using the standard manual procedure, with acetabular component locations assessed during and after surgery.</p><p><strong>Results: </strong>The rTHA cohort was significantly younger, but no other significant differences were found between the two cohorts in preoperative baseline data. In rTHA cohort, the planned inclination (40.0 ± 0.3°) closely matched the intraoperative (40.2 ± 2.7°; p = 0.54) and postoperative (40.7 ± 4.0°; p = 0.07) measurements. However, anteversion showed a significant increase from planned (19.4 ± 1.5°) to postoperative CT scan (28.7 ± 7.0°; p < 0.001). There was evidence of proportional bias in the measurements (p < 0.001). In the cTHA cohort, the mean inclination (43.1 ± 5.1°) did not show any significant change between the preoperative plans and postoperative assessments (p = 0.12); however, there was a remarkable change in the mean anteversion (17.6 ± 6.4°) between postoperative measurements and the preoperative plans (p < 0.001). The average anteversion in the preoperative plans did not differ remarkably between the rTHA and cTHA cohorts. However, the average inclination was substantially different between the two cohorts (p < 0.001). Both groups had no significant differences in the proportion of cups outside the referenced safe zones.</p><p><strong>Conclusion: </strong>The results suggest that while robotic-assisted guidance ensures consistent cup inclination, there may be more variability in achieving the planned anteversion, which warrants further investigation into the factors influencing postoperative changes in acetabular orientation.</p>","PeriodicalId":46378,"journal":{"name":"SICOT-J","volume":"10 ","pages":"57"},"PeriodicalIF":2.3000,"publicationDate":"2024-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11661779/pdf/","citationCount":"0","resultStr":"{\"title\":\"Accuracy of acetabular cup positioning in robotic-assisted total hip arthroplasty: a CT-based evaluation.\",\"authors\":\"Ashish Singh, Purushotam Kumar, Kanukuntla Kalyan, Akash Chandrashekar Gundalli, Sudhir Shankar Mane, Himanshu Swarnkar, Lavanya Singh\",\"doi\":\"10.1051/sicotj/2024057\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Introduction: </strong>Robot-assisted instrumentation during total hip arthroplasty (THA) has the potential to improve acetabular cup positioning. This study aimed to evaluate the precision of robotic-arm-assisted THA (rTHA) and assess whether the system can provide accurate cup positioning comparable to conventional THA (cTHA).</p><p><strong>Methods: </strong>A single-center prospective cohort study consisting of 151 patients who underwent THA (108 rTHA and 43 cTHA). The robotically assisted system was used to match the postoperative computed tomography (CT) image of the pelvis with the planned and intraoperative anatomical landmarks. The cTHA cohort underwent hip replacement using the standard manual procedure, with acetabular component locations assessed during and after surgery.</p><p><strong>Results: </strong>The rTHA cohort was significantly younger, but no other significant differences were found between the two cohorts in preoperative baseline data. In rTHA cohort, the planned inclination (40.0 ± 0.3°) closely matched the intraoperative (40.2 ± 2.7°; p = 0.54) and postoperative (40.7 ± 4.0°; p = 0.07) measurements. However, anteversion showed a significant increase from planned (19.4 ± 1.5°) to postoperative CT scan (28.7 ± 7.0°; p < 0.001). There was evidence of proportional bias in the measurements (p < 0.001). In the cTHA cohort, the mean inclination (43.1 ± 5.1°) did not show any significant change between the preoperative plans and postoperative assessments (p = 0.12); however, there was a remarkable change in the mean anteversion (17.6 ± 6.4°) between postoperative measurements and the preoperative plans (p < 0.001). The average anteversion in the preoperative plans did not differ remarkably between the rTHA and cTHA cohorts. However, the average inclination was substantially different between the two cohorts (p < 0.001). Both groups had no significant differences in the proportion of cups outside the referenced safe zones.</p><p><strong>Conclusion: </strong>The results suggest that while robotic-assisted guidance ensures consistent cup inclination, there may be more variability in achieving the planned anteversion, which warrants further investigation into the factors influencing postoperative changes in acetabular orientation.</p>\",\"PeriodicalId\":46378,\"journal\":{\"name\":\"SICOT-J\",\"volume\":\"10 \",\"pages\":\"57\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2024-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11661779/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"SICOT-J\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1051/sicotj/2024057\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/12/20 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q2\",\"JCRName\":\"ORTHOPEDICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"SICOT-J","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1051/sicotj/2024057","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/12/20 0:00:00","PubModel":"Epub","JCR":"Q2","JCRName":"ORTHOPEDICS","Score":null,"Total":0}
Accuracy of acetabular cup positioning in robotic-assisted total hip arthroplasty: a CT-based evaluation.
Introduction: Robot-assisted instrumentation during total hip arthroplasty (THA) has the potential to improve acetabular cup positioning. This study aimed to evaluate the precision of robotic-arm-assisted THA (rTHA) and assess whether the system can provide accurate cup positioning comparable to conventional THA (cTHA).
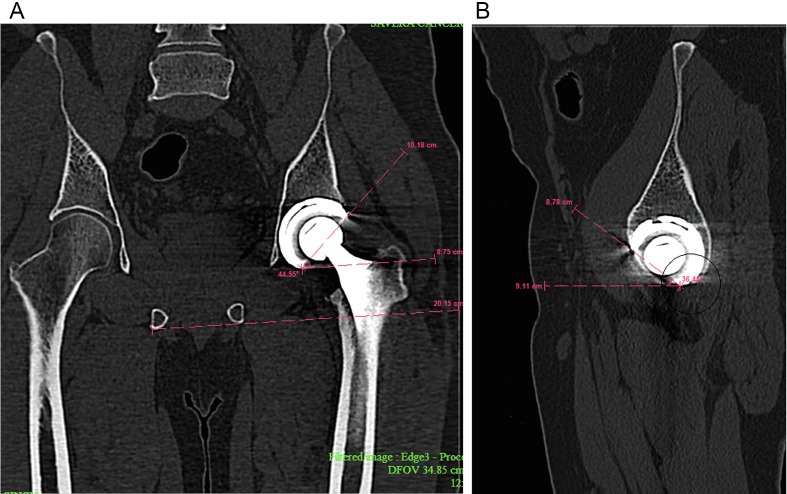
Methods: A single-center prospective cohort study consisting of 151 patients who underwent THA (108 rTHA and 43 cTHA). The robotically assisted system was used to match the postoperative computed tomography (CT) image of the pelvis with the planned and intraoperative anatomical landmarks. The cTHA cohort underwent hip replacement using the standard manual procedure, with acetabular component locations assessed during and after surgery.
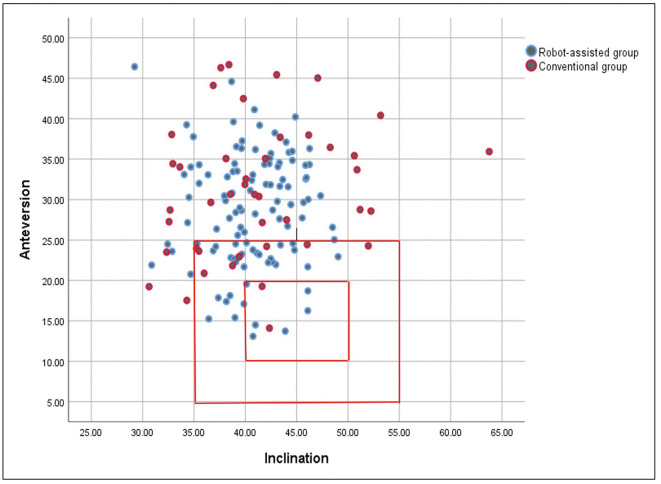
Results: The rTHA cohort was significantly younger, but no other significant differences were found between the two cohorts in preoperative baseline data. In rTHA cohort, the planned inclination (40.0 ± 0.3°) closely matched the intraoperative (40.2 ± 2.7°; p = 0.54) and postoperative (40.7 ± 4.0°; p = 0.07) measurements. However, anteversion showed a significant increase from planned (19.4 ± 1.5°) to postoperative CT scan (28.7 ± 7.0°; p < 0.001). There was evidence of proportional bias in the measurements (p < 0.001). In the cTHA cohort, the mean inclination (43.1 ± 5.1°) did not show any significant change between the preoperative plans and postoperative assessments (p = 0.12); however, there was a remarkable change in the mean anteversion (17.6 ± 6.4°) between postoperative measurements and the preoperative plans (p < 0.001). The average anteversion in the preoperative plans did not differ remarkably between the rTHA and cTHA cohorts. However, the average inclination was substantially different between the two cohorts (p < 0.001). Both groups had no significant differences in the proportion of cups outside the referenced safe zones.
Conclusion: The results suggest that while robotic-assisted guidance ensures consistent cup inclination, there may be more variability in achieving the planned anteversion, which warrants further investigation into the factors influencing postoperative changes in acetabular orientation.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


