Simon Luis Jeger, Valentin Wüest, Charbel Toumieh, Dario Floreano
{"title":"对机翼和机尾进行自适应变形,实现鸟类启发无人机的稳定、弹性和节能飞行","authors":"Simon Luis Jeger, Valentin Wüest, Charbel Toumieh, Dario Floreano","doi":"10.1038/s44182-024-00015-y","DOIUrl":null,"url":null,"abstract":"Avian-inspired drones feature morphing wing and tail surfaces, enhancing agility and adaptability in flight. Despite their large potential, realising their full capabilities remains challenging due to the lack of generalized control strategies accommodating their large degrees of freedom and cross-coupling effects between their control surfaces. Here we propose a new body-rate controller for avian-inspired drones that uses all available actuators to control the motion of the drone. The method exhibits robustness against physical perturbations, turbulent airflow, and even loss of certain actuators mid-flight. Furthermore, wing and tail morphing is leveraged to enhance energy efficiency at 8 m/s, 10 m/s, and 12 m/s using in-flight Bayesian optimization. The resulting morphing configurations yield significant gains across all three speeds of up to 11.5% compared to non-morphing configurations and display a strong resemblance to avian flight at different speeds. This research lays the groundwork for the development of autonomous avian-inspired drones that operate under diverse wind conditions, emphasizing the role of morphing in improving energy efficiency.","PeriodicalId":499869,"journal":{"name":"npj Robotics","volume":" ","pages":"1-10"},"PeriodicalIF":0.0000,"publicationDate":"2024-11-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.nature.com/articles/s44182-024-00015-y.pdf","citationCount":"0","resultStr":"{\"title\":\"Adaptive morphing of wing and tail for stable, resilient, and energy-efficient flight of avian-inspired drones\",\"authors\":\"Simon Luis Jeger, Valentin Wüest, Charbel Toumieh, Dario Floreano\",\"doi\":\"10.1038/s44182-024-00015-y\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"Avian-inspired drones feature morphing wing and tail surfaces, enhancing agility and adaptability in flight. Despite their large potential, realising their full capabilities remains challenging due to the lack of generalized control strategies accommodating their large degrees of freedom and cross-coupling effects between their control surfaces. Here we propose a new body-rate controller for avian-inspired drones that uses all available actuators to control the motion of the drone. The method exhibits robustness against physical perturbations, turbulent airflow, and even loss of certain actuators mid-flight. Furthermore, wing and tail morphing is leveraged to enhance energy efficiency at 8 m/s, 10 m/s, and 12 m/s using in-flight Bayesian optimization. The resulting morphing configurations yield significant gains across all three speeds of up to 11.5% compared to non-morphing configurations and display a strong resemblance to avian flight at different speeds. This research lays the groundwork for the development of autonomous avian-inspired drones that operate under diverse wind conditions, emphasizing the role of morphing in improving energy efficiency.\",\"PeriodicalId\":499869,\"journal\":{\"name\":\"npj Robotics\",\"volume\":\" \",\"pages\":\"1-10\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2024-11-20\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.nature.com/articles/s44182-024-00015-y.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"npj Robotics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.nature.com/articles/s44182-024-00015-y\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"npj Robotics","FirstCategoryId":"1085","ListUrlMain":"https://www.nature.com/articles/s44182-024-00015-y","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
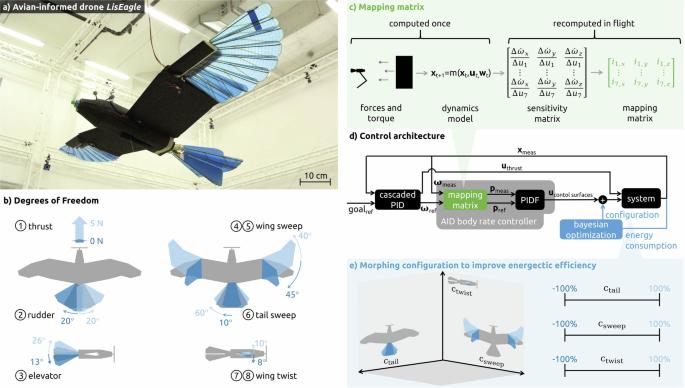
Adaptive morphing of wing and tail for stable, resilient, and energy-efficient flight of avian-inspired drones
Avian-inspired drones feature morphing wing and tail surfaces, enhancing agility and adaptability in flight. Despite their large potential, realising their full capabilities remains challenging due to the lack of generalized control strategies accommodating their large degrees of freedom and cross-coupling effects between their control surfaces. Here we propose a new body-rate controller for avian-inspired drones that uses all available actuators to control the motion of the drone. The method exhibits robustness against physical perturbations, turbulent airflow, and even loss of certain actuators mid-flight. Furthermore, wing and tail morphing is leveraged to enhance energy efficiency at 8 m/s, 10 m/s, and 12 m/s using in-flight Bayesian optimization. The resulting morphing configurations yield significant gains across all three speeds of up to 11.5% compared to non-morphing configurations and display a strong resemblance to avian flight at different speeds. This research lays the groundwork for the development of autonomous avian-inspired drones that operate under diverse wind conditions, emphasizing the role of morphing in improving energy efficiency.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


