利用图注意网络和强化学习进行风险评估和视觉遮挡下的交互式运动规划
IF 8
1区 工程技术
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
摘要
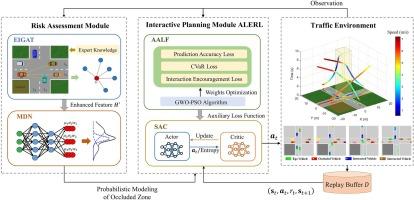
本研究提出了一种创新框架,该框架将自动驾驶汽车(AV)在闭塞交叉路口无保护左转时的风险评估和交互式规划融为一体。该框架的上层风险评估模块协同专家信息图注意网络(EIGAT)和混合密度网络(MDN),预测闭塞区域潜在风险的概率分布。而下层交互式规划模块则利用自适应损失增强强化学习(ALERL),进一步开发了一种交互式策略,该策略综合考虑了盲区预测准确性、条件风险值(CVaR)的潜在风险度量以及鼓励探索性交互等额外因素。在不同交通密度水平的闭塞交叉路口场景中进行了模拟测试。与其他基线方法相比,定性和定量性能验证了我们提出的控制器在风险评估和 AV 互动规划方面的有效性和适应性。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Risk assessment and interactive motion planning with visual occlusion using graph attention networks and reinforcement learning
This study proposes an innovative framework that integrates risk assessment and interactive planning for autonomous vehicles (AVs) navigating unprotected left turns at occluded intersections. The upper risk assessment module of this framework synergizes Expert-Informed Graph Attention Networks (EIGAT) with Mixture Density Network (MDN) to predict the probabilistic distributions of the potential risk of the occluded zone. And the lower interactive planning module, utilizing Adaptive Loss Enhanced Reinforcement Learning (ALERL), further develops an interactive policy that integrates additional considerations for prediction accuracy of blind zones, potential risk measure of conditional value at risk (CVaR), and encourage of exploratory interaction. Simulation tests are conducted in occluded intersection scenarios with various traffic density level. Both qualitative and quantitative performance validate the effectiveness and adaptability of our proposed controller in risk assessment and interactive planning for AVs compared with other baseline methods.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Advanced Engineering Informatics
工程技术-工程:综合
CiteScore
12.40
自引率
18.20%
发文量
292
审稿时长
45 days
期刊介绍:
Advanced Engineering Informatics is an international Journal that solicits research papers with an emphasis on 'knowledge' and 'engineering applications'. The Journal seeks original papers that report progress in applying methods of engineering informatics. These papers should have engineering relevance and help provide a scientific base for more reliable, spontaneous, and creative engineering decision-making. Additionally, papers should demonstrate the science of supporting knowledge-intensive engineering tasks and validate the generality, power, and scalability of new methods through rigorous evaluation, preferably both qualitatively and quantitatively. Abstracting and indexing for Advanced Engineering Informatics include Science Citation Index Expanded, Scopus and INSPEC.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


