{"title":"探索使用实时空间德尔菲和广义运算网络确定主动移动路径位置的混合模型。","authors":"Yuri Calleo, Nadia Giuffrida, Francesco Pilla","doi":"10.1186/s12544-024-00685-7","DOIUrl":null,"url":null,"abstract":"<p><p>The spatial planning process is considered an extremely complex system, as it comprises different variables that interrelate and interact with each other. Effectively addressing this spatial complexity necessitates a multidisciplinary approach, as unified methodologies may prove insufficient. Specifically, in urban planning, it is increasingly crucial to prioritize bike lanes, bike stations, and pedestrian zones, for functional transportation infrastructures. This approach can enhance cities by improving air quality, reducing emissions, and boosting public health and safety through physical activity and accident prevention. However, implementing these changes requires careful planning, community engagement, and stakeholder collaboration. This paper proposes a hybrid model for identifying optimal locations for bike lanes, bike stations, and pedestrian zones adopting Real-Time Spatial Delphi and Generative Adversarial Networks (GANs). The Real-Time Spatial Delphi is a modified version of the traditional Delphi method that incorporates real-time feedback and visualization of group response in real-time, aiming to achieve a convergence of opinions among experts on the territory. Nevertheless, these judgments are a spatial representation not visible in reality, and with the spread of artificial intelligence models, different implementations can support the planning process, such as the use of GANs. In this case, GANs can be exploited by adopting pre-existing location images resulting from experts' judgments to illustrate the proposed intervention's visual impact. To demonstrate the effectiveness of our hybrid model, we apply it to the city of Dublin. The results showcased how the method helps stakeholders, policymakers, and citizens in visualizing the proposed changes and gauging their potential impact with greater precision.</p>","PeriodicalId":48671,"journal":{"name":"European Transport Research Review","volume":"16 1","pages":"61"},"PeriodicalIF":4.2000,"publicationDate":"2024-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11543772/pdf/","citationCount":"0","resultStr":"{\"title\":\"Exploring hybrid models for identifying locations for active mobility pathways using real-time spatial Delphi and GANs.\",\"authors\":\"Yuri Calleo, Nadia Giuffrida, Francesco Pilla\",\"doi\":\"10.1186/s12544-024-00685-7\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>The spatial planning process is considered an extremely complex system, as it comprises different variables that interrelate and interact with each other. Effectively addressing this spatial complexity necessitates a multidisciplinary approach, as unified methodologies may prove insufficient. Specifically, in urban planning, it is increasingly crucial to prioritize bike lanes, bike stations, and pedestrian zones, for functional transportation infrastructures. This approach can enhance cities by improving air quality, reducing emissions, and boosting public health and safety through physical activity and accident prevention. However, implementing these changes requires careful planning, community engagement, and stakeholder collaboration. This paper proposes a hybrid model for identifying optimal locations for bike lanes, bike stations, and pedestrian zones adopting Real-Time Spatial Delphi and Generative Adversarial Networks (GANs). The Real-Time Spatial Delphi is a modified version of the traditional Delphi method that incorporates real-time feedback and visualization of group response in real-time, aiming to achieve a convergence of opinions among experts on the territory. Nevertheless, these judgments are a spatial representation not visible in reality, and with the spread of artificial intelligence models, different implementations can support the planning process, such as the use of GANs. In this case, GANs can be exploited by adopting pre-existing location images resulting from experts' judgments to illustrate the proposed intervention's visual impact. To demonstrate the effectiveness of our hybrid model, we apply it to the city of Dublin. The results showcased how the method helps stakeholders, policymakers, and citizens in visualizing the proposed changes and gauging their potential impact with greater precision.</p>\",\"PeriodicalId\":48671,\"journal\":{\"name\":\"European Transport Research Review\",\"volume\":\"16 1\",\"pages\":\"61\"},\"PeriodicalIF\":4.2000,\"publicationDate\":\"2024-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11543772/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"European Transport Research Review\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1186/s12544-024-00685-7\",\"RegionNum\":3,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/11/7 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"European Transport Research Review","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1186/s12544-024-00685-7","RegionNum":3,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/11/7 0:00:00","PubModel":"Epub","JCR":"","JCRName":"","Score":null,"Total":0}
Exploring hybrid models for identifying locations for active mobility pathways using real-time spatial Delphi and GANs.
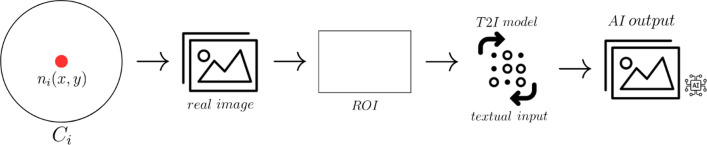
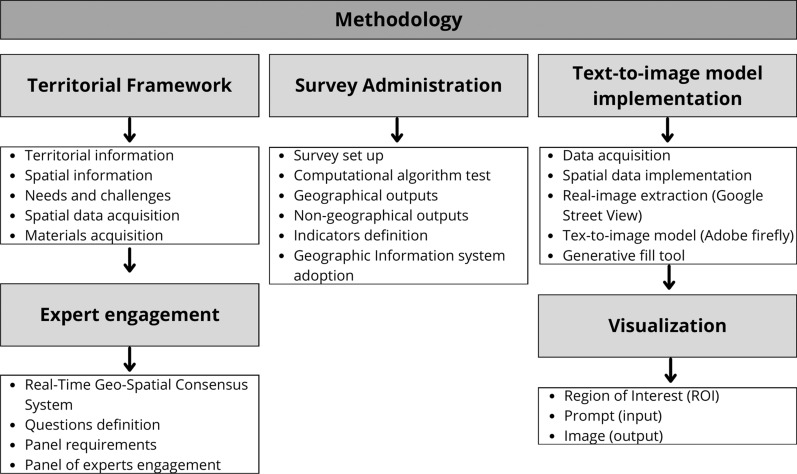
The spatial planning process is considered an extremely complex system, as it comprises different variables that interrelate and interact with each other. Effectively addressing this spatial complexity necessitates a multidisciplinary approach, as unified methodologies may prove insufficient. Specifically, in urban planning, it is increasingly crucial to prioritize bike lanes, bike stations, and pedestrian zones, for functional transportation infrastructures. This approach can enhance cities by improving air quality, reducing emissions, and boosting public health and safety through physical activity and accident prevention. However, implementing these changes requires careful planning, community engagement, and stakeholder collaboration. This paper proposes a hybrid model for identifying optimal locations for bike lanes, bike stations, and pedestrian zones adopting Real-Time Spatial Delphi and Generative Adversarial Networks (GANs). The Real-Time Spatial Delphi is a modified version of the traditional Delphi method that incorporates real-time feedback and visualization of group response in real-time, aiming to achieve a convergence of opinions among experts on the territory. Nevertheless, these judgments are a spatial representation not visible in reality, and with the spread of artificial intelligence models, different implementations can support the planning process, such as the use of GANs. In this case, GANs can be exploited by adopting pre-existing location images resulting from experts' judgments to illustrate the proposed intervention's visual impact. To demonstrate the effectiveness of our hybrid model, we apply it to the city of Dublin. The results showcased how the method helps stakeholders, policymakers, and citizens in visualizing the proposed changes and gauging their potential impact with greater precision.
期刊介绍:
European Transport Research Review (ETRR) is a peer-reviewed open access journal publishing original high-quality scholarly research and developments in areas related to transportation science, technologies, policy and practice. Established in 2008 by the European Conference of Transport Research Institutes (ECTRI), the Journal provides researchers and practitioners around the world with an authoritative forum for the dissemination and critical discussion of new ideas and methodologies that originate in, or are of special interest to, the European transport research community. The journal is unique in its field, as it covers all modes of transport and addresses both the engineering and the social science perspective, offering a truly multidisciplinary platform for researchers, practitioners, engineers and policymakers. ETRR is aimed at a readership including researchers, practitioners in the design and operation of transportation systems, and policymakers at the international, national, regional and local levels.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


