柔软的机器人短裤提高了老年人的户外行走效率
IF 18.8
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
摘要
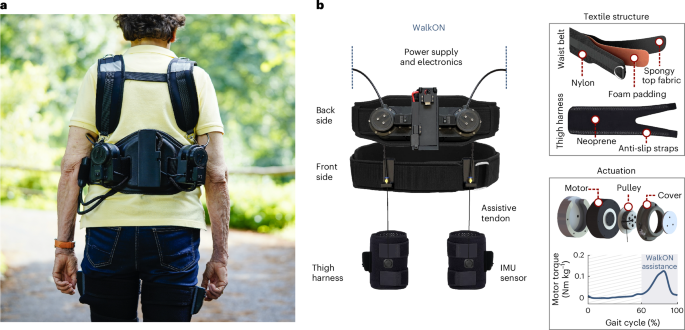
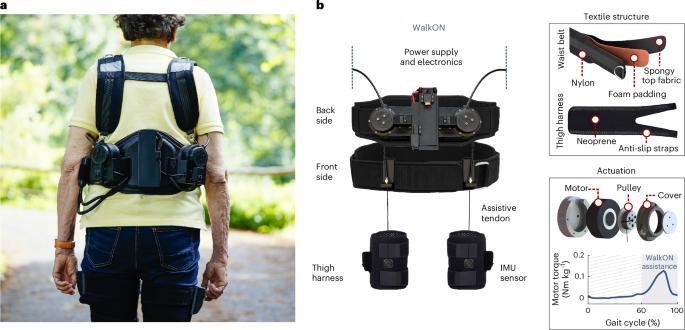
随着年龄的增长,人们的行走效率会下降,从而对行动能力造成限制,并影响独立性和生活质量。尽管可穿戴辅助技术被认为是解决与年龄相关的运动难题的潜在方案,但很少有技术被证明对老年人有效,主要是在实验室对照实验中。在此,我们介绍一款名为 WalkON 的软机器人短裤,旨在通过辅助髋关节屈曲来提高老年人的行走效率。该系统采用小巧轻便的肌腱驱动设计,利用基于腿部自然运动的控制器自主辅助腿部伸展。为了评估 WalkON 对日常行走的影响,我们首先在要求苛刻的 500 米室外上坡徒步路径上对年轻成年人进行了技术评估。然后,我们又用一组在平坦的室外 400 米跑道上行走的老年人验证了我们的研究结果。在上坡行走过程中,WalkON 大大降低了青壮年的运输代谢成本,降低了 17.79%。与此同时,参与者对自己的自主运动有很高的控制感知(利克特量表的自我报告平均分为 6.20 分(满分 7 分))。同样,老年人在平地行走过程中使用 WalkON 时,新陈代谢成本降低了 10.48%,同时保持了很强的运动控制感(平均分为 6.09 分,满分为 7 分)。这些发现强调了可穿戴辅助设备在提高户外行走效率方面的潜力,为促进身体健康和提高行动能力(尤其是在晚年阶段)带来了希望。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Soft robotic shorts improve outdoor walking efficiency in older adults
Peoples'' walking efficiency declines as they grow older, posing constraints on mobility, and affecting independence and quality of life. Although wearable assistive technologies are recognized as a potential solution for age-related movement challenges, few have proven effective for older adults, predominantly within controlled laboratory experiments. Here we present WalkON, a pair of soft robotic shorts designed to enhance walking efficiency for older individuals by assisting hip flexion. The system features a compact and lightweight tendon-driven design, using a controller based on natural leg movements to autonomously assist leg propagation. To assess WalkON''s impact on daily walking, we initially conducted a technology assessment with young adults on a demanding outdoor uphill 500 m hiking trail. We then validated our findings with a group of older adults walking on a flat outdoor 400 m track. WalkON considerably reduced the metabolic cost of transport by 17.79% for young adults during uphill walking. At the same time, participants reported high perceived control over their voluntary movements (a self-reported mean score of 6.20 out of 7 on a Likert scale). Similarly, older adults reduced their metabolic cost by 10.48% when using WalkON during level ground walking, while retaining a strong sense of movement control (mean score of 6.09 out of 7). These findings emphasize the potential of wearable assistive devices to improve efficiency in outdoor walking, suggesting promising implications for promoting physical well-being and advancing mobility, particularly during the later stages of life. Walking efficiency declines in older adults. To address this challenge, Tricomi and colleagues present a pair of lightweight, soft robotic shorts that enhance walking efficiency for older adults by assisting leg mobility. This method improves energy efficiency on outdoor tracks while maintaining the users’ natural movement control.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Nature Machine Intelligence
Multiple-
CiteScore
36.90
自引率
2.10%
发文量
127
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


