通过强化学习实现基于翼应变的拍翼无人机飞行控制
IF 18.8
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
摘要
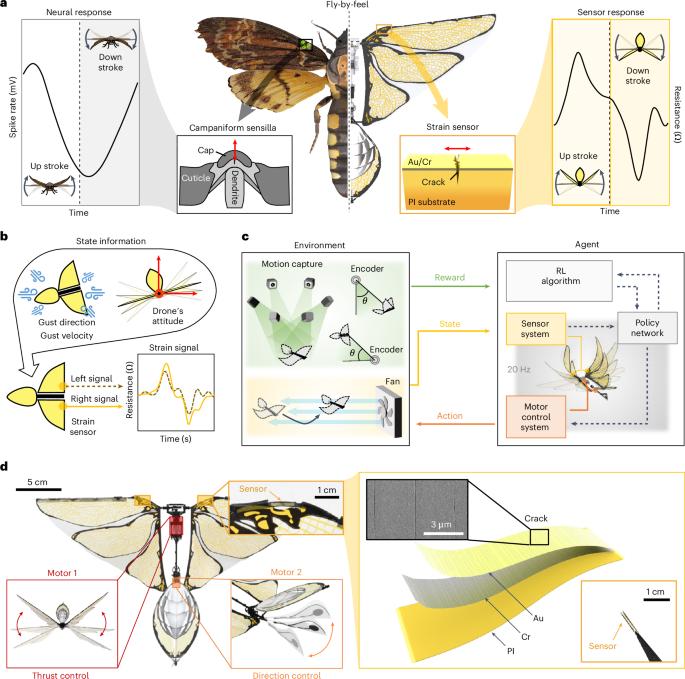
尽管无人机技术发展迅速,但复制生物飞行的动态控制和风感能力仍然遥不可及。生物学研究表明,昆虫翅膀上装有被称为 "钟状感觉器 "的机械感受器,它们能检测到对飞行灵活性至关重要的复杂空气动力负荷。通过利用旨在模仿这些生物系统的机器人实验,我们证实,翅膀应变提供了有关无人机姿态角以及风向和风速的重要信息。我们介绍了一种基于机翼应变的飞行控制器,它利用无人机拍打机翼时产生的空气动力来推断飞行姿态和气流等重要飞行数据,而无需加速度计和陀螺仪传感器。目前的工作包括五项关键实验:提供状态信息的机翼应变传感器系统的初步验证、在风力变化的单自由度运动环境中的控制、在重力姿态调整的双自由度运动环境中的控制、大风条件下的位置控制测试以及仅使用机翼应变传感器在无风条件下精确操纵飞行路径的演示。在强化学习驱动的飞行控制器的帮助下,我们成功地演示了仅利用机翼应变传感器在各种环境下对拍击式无人机的控制。所展示的对环境变化的适应性将有益于各种应用,从抗阵风到自主飞行机器人的风力辅助飞行。受飞行昆虫上机械感受器的启发,一种利用机翼上的应变传感器和基于强化学习的飞行控制的拍翼无人机被开发出来。该无人机可以在各种不稳定的环境中飞行,包括大风天气。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Wing-strain-based flight control of flapping-wing drones through reinforcement learning
Although drone technology has advanced rapidly, replicating the dynamic control and wind-sensing abilities of biological flight is still beyond reach. Biological studies reveal that insect wings are equipped with mechanoreceptors known as campaniform sensilla, which detect complex aerodynamic loads critical for flight agility. By leveraging robotic experiments designed to mimic these biological systems, we confirm that wing strain provides crucial information about the drone’s attitude angle, as well as the direction and velocity of the wind. We introduce a wing-strain-based flight controller that employs the aerodynamic forces exerted on a flapping drone’s wings to deduce vital flight data such as attitude and airflow without accelerometers and gyroscopic sensors. The present work spans five key experiments: initial validation of the wing strain sensor system for state information provision, control in a single degree of freedom movement environment with changing winds, control in a two degrees of freedom movement environment for gravitational attitude adjustment, a test for position control in windy conditions and a demonstration of precise flight path manipulation in a windless condition using only wing strain sensors. We have successfully demonstrated control of a flapping drone in various environments using only wing strain sensors, with the aid of a reinforcement-learning-driven flight controller. The demonstrated adaptability to environmental shifts will be beneficial across varied applications, from gust resistance to wind-assisted flight for autonomous flying robots. Inspired by mechanoreceptors on flying insects, a flapping-wing drone that makes use of strain sensors on the wings and reinforcement-learning-based flight control has been developed. The drone can fly in various unsteady environments, including in windy conditions.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Nature Machine Intelligence
Multiple-
CiteScore
36.90
自引率
2.10%
发文量
127
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


