Yusaku Nakajima, Kai Kawasaki, Yasuo Takeichi, Masashi Hamaya, Yoshitaka Ushiku and Kanta Ono
{"title":"力控机器人机械化学合成","authors":"Yusaku Nakajima, Kai Kawasaki, Yasuo Takeichi, Masashi Hamaya, Yoshitaka Ushiku and Kanta Ono","doi":"10.1039/D4DD00189C","DOIUrl":null,"url":null,"abstract":"<p >We demonstrate a novel mechanochemical synthesis method using a robotic powder grinding system that applies a precisely controlled and constant mechanical force. This approach significantly enhances reproducibility and enables detailed analysis of reaction pathways. Our results indicate that robotic force control can alter the reaction rate and influence the reaction pathway, highlighting its potential for elucidating chemical reaction mechanisms and fostering the discovery of new chemical reactions. Despite its significance, the application of a controllable constant force in macroscale mechanochemical synthesis remains challenging. To address this gap, we compared the reproducibilities of various mechanochemical syntheses using conventional manual grinding, ball milling, and our novel robotic approach with perovskite materials. Our findings indicate that the robotic approach provides significantly higher reproducibility than conventional methods, facilitating the analysis of reaction pathways. By manipulating the grinding force and speed, we revealed that robotic force control can alter both the reaction rate and pathway. Consequently, robotic mechanochemical synthesis has significant potential for advancing the understanding of chemical reaction mechanisms and discovering new reactions.</p>","PeriodicalId":72816,"journal":{"name":"Digital discovery","volume":" 10","pages":" 2130-2136"},"PeriodicalIF":6.2000,"publicationDate":"2024-09-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://pubs.rsc.org/en/content/articlepdf/2024/dd/d4dd00189c?page=search","citationCount":"0","resultStr":"{\"title\":\"Force-controlled robotic mechanochemical synthesis†\",\"authors\":\"Yusaku Nakajima, Kai Kawasaki, Yasuo Takeichi, Masashi Hamaya, Yoshitaka Ushiku and Kanta Ono\",\"doi\":\"10.1039/D4DD00189C\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p >We demonstrate a novel mechanochemical synthesis method using a robotic powder grinding system that applies a precisely controlled and constant mechanical force. This approach significantly enhances reproducibility and enables detailed analysis of reaction pathways. Our results indicate that robotic force control can alter the reaction rate and influence the reaction pathway, highlighting its potential for elucidating chemical reaction mechanisms and fostering the discovery of new chemical reactions. Despite its significance, the application of a controllable constant force in macroscale mechanochemical synthesis remains challenging. To address this gap, we compared the reproducibilities of various mechanochemical syntheses using conventional manual grinding, ball milling, and our novel robotic approach with perovskite materials. Our findings indicate that the robotic approach provides significantly higher reproducibility than conventional methods, facilitating the analysis of reaction pathways. By manipulating the grinding force and speed, we revealed that robotic force control can alter both the reaction rate and pathway. Consequently, robotic mechanochemical synthesis has significant potential for advancing the understanding of chemical reaction mechanisms and discovering new reactions.</p>\",\"PeriodicalId\":72816,\"journal\":{\"name\":\"Digital discovery\",\"volume\":\" 10\",\"pages\":\" 2130-2136\"},\"PeriodicalIF\":6.2000,\"publicationDate\":\"2024-09-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://pubs.rsc.org/en/content/articlepdf/2024/dd/d4dd00189c?page=search\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Digital discovery\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://pubs.rsc.org/en/content/articlelanding/2024/dd/d4dd00189c\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"CHEMISTRY, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Digital discovery","FirstCategoryId":"1085","ListUrlMain":"https://pubs.rsc.org/en/content/articlelanding/2024/dd/d4dd00189c","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
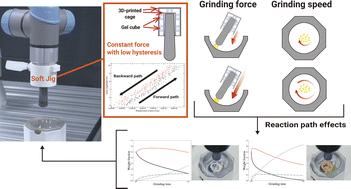
We demonstrate a novel mechanochemical synthesis method using a robotic powder grinding system that applies a precisely controlled and constant mechanical force. This approach significantly enhances reproducibility and enables detailed analysis of reaction pathways. Our results indicate that robotic force control can alter the reaction rate and influence the reaction pathway, highlighting its potential for elucidating chemical reaction mechanisms and fostering the discovery of new chemical reactions. Despite its significance, the application of a controllable constant force in macroscale mechanochemical synthesis remains challenging. To address this gap, we compared the reproducibilities of various mechanochemical syntheses using conventional manual grinding, ball milling, and our novel robotic approach with perovskite materials. Our findings indicate that the robotic approach provides significantly higher reproducibility than conventional methods, facilitating the analysis of reaction pathways. By manipulating the grinding force and speed, we revealed that robotic force control can alter both the reaction rate and pathway. Consequently, robotic mechanochemical synthesis has significant potential for advancing the understanding of chemical reaction mechanisms and discovering new reactions.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


