{"title":"基于单锚定和地图的射频源定位方法,在改进粒子滤波器中使用反射法","authors":"Saeid Haidari, Alireza Hosseinpour","doi":"10.3103/S0146411624700500","DOIUrl":null,"url":null,"abstract":"<p>This paper presents a new method of localizing radio frequency (RF) source in non-line of sight (NLOS) using data collected using the anchor and map. The measurable observation in the unmanned aerial vehicle (UAV) is assumed to be the received signal strength indicator (RSSI), and a method is presented based on the RSSI observation of the reflected signal sent from the anchor to estimate the location of the reflecting obstacle, which is a two-step method for map estimation and localization. It is also assumed that the map of the obstacle location is also available; the location of the reflective obstacle can be obtained using the map with an error. And finally, by combining this data in a weighted and improved particle filter for the optimal use of the number of particles in a wide area, the location of the unknown RF source is estimated more accurately. It was revealed that the proposed method improved localization and had good precision.</p>","PeriodicalId":46238,"journal":{"name":"AUTOMATIC CONTROL AND COMPUTER SCIENCES","volume":"58 4","pages":"379 - 391"},"PeriodicalIF":0.6000,"publicationDate":"2024-08-28","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"RF Source Localization Method Based on a Single-Anchor and Map Using Reflection in an Improved Particle Filter\",\"authors\":\"Saeid Haidari, Alireza Hosseinpour\",\"doi\":\"10.3103/S0146411624700500\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>This paper presents a new method of localizing radio frequency (RF) source in non-line of sight (NLOS) using data collected using the anchor and map. The measurable observation in the unmanned aerial vehicle (UAV) is assumed to be the received signal strength indicator (RSSI), and a method is presented based on the RSSI observation of the reflected signal sent from the anchor to estimate the location of the reflecting obstacle, which is a two-step method for map estimation and localization. It is also assumed that the map of the obstacle location is also available; the location of the reflective obstacle can be obtained using the map with an error. And finally, by combining this data in a weighted and improved particle filter for the optimal use of the number of particles in a wide area, the location of the unknown RF source is estimated more accurately. It was revealed that the proposed method improved localization and had good precision.</p>\",\"PeriodicalId\":46238,\"journal\":{\"name\":\"AUTOMATIC CONTROL AND COMPUTER SCIENCES\",\"volume\":\"58 4\",\"pages\":\"379 - 391\"},\"PeriodicalIF\":0.6000,\"publicationDate\":\"2024-08-28\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"AUTOMATIC CONTROL AND COMPUTER SCIENCES\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://link.springer.com/article/10.3103/S0146411624700500\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"AUTOMATIC CONTROL AND COMPUTER SCIENCES","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.3103/S0146411624700500","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
RF Source Localization Method Based on a Single-Anchor and Map Using Reflection in an Improved Particle Filter
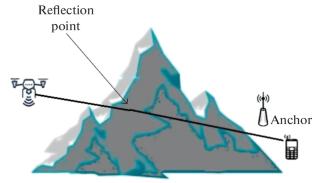
This paper presents a new method of localizing radio frequency (RF) source in non-line of sight (NLOS) using data collected using the anchor and map. The measurable observation in the unmanned aerial vehicle (UAV) is assumed to be the received signal strength indicator (RSSI), and a method is presented based on the RSSI observation of the reflected signal sent from the anchor to estimate the location of the reflecting obstacle, which is a two-step method for map estimation and localization. It is also assumed that the map of the obstacle location is also available; the location of the reflective obstacle can be obtained using the map with an error. And finally, by combining this data in a weighted and improved particle filter for the optimal use of the number of particles in a wide area, the location of the unknown RF source is estimated more accurately. It was revealed that the proposed method improved localization and had good precision.
期刊介绍:
Automatic Control and Computer Sciences is a peer reviewed journal that publishes articles on• Control systems, cyber-physical system, real-time systems, robotics, smart sensors, embedded intelligence • Network information technologies, information security, statistical methods of data processing, distributed artificial intelligence, complex systems modeling, knowledge representation, processing and management • Signal and image processing, machine learning, machine perception, computer vision


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


