Sasank Das Gangula, Tousif Khan Nizami, Ramanjaneya Reddy Udumula, Arghya Chakravarty, Fareed Ahmad
{"title":"直流-直流电源转换器驱动永磁直流电机的泽尼克径向基神经网络控制:设计与实验验证","authors":"Sasank Das Gangula, Tousif Khan Nizami, Ramanjaneya Reddy Udumula, Arghya Chakravarty, Fareed Ahmad","doi":"10.1007/s00202-024-02659-3","DOIUrl":null,"url":null,"abstract":"<p>This article presents a novel control architecture for an enhanced closed-loop speed tracking of a DC–DC buck power converter fed Permanent Magnet DC motor (PMDC) motor in face of large exogenous load torque uncertainty. The proposed architecture combines a new self learning Zernike radial polynomial neural network (ZRNN) estimator with the backstepping controller. The design involves a computationally simple online learning based ZRNN to rapidly and accurately estimate the unknown large load torque uncertainties. The proposed control solution concurrently guarantees stability and excellent dynamic performance through an effective neural network based estimation and subsequent compensation of unanticipated load torque perturbations over a wide range. The closed loop stability of the DC–DC buck power converter driven PMDC motor and asymptotic speed tracking with the proposed neuro-adaptive controller is proved using the stability theory for non-autonomous systems. The effectiveness of the proposed controller has been investigated through experimentation on an indigenously developed laboratory prototype of 200 W under closed loop operation using digital signal processors. The tests conducted around different operating conditions include the motor start-up response, step variations in the load torque, and step changes in the reference speed. Experimental results demonstrate a significant improvement in the speed tracking performance achieving <span>\\(48.13 \\%\\)</span> reduction in the settling time and no-change in speed during start-up and load torque perturbations upto <span>\\(600\\%\\)</span>, respectively. Experimental validations and extensive tests spanning over a large operating region, substantiate the theoretical claims and real-time suitability of the proposed controller for sensitive applications demanding high performance.</p>","PeriodicalId":50546,"journal":{"name":"Electrical Engineering","volume":"390 1","pages":""},"PeriodicalIF":1.6000,"publicationDate":"2024-08-21","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Zernike radial basis neural network control of DC–DC power converter driven permanent magnet DC motor: design and experimental validation\",\"authors\":\"Sasank Das Gangula, Tousif Khan Nizami, Ramanjaneya Reddy Udumula, Arghya Chakravarty, Fareed Ahmad\",\"doi\":\"10.1007/s00202-024-02659-3\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>This article presents a novel control architecture for an enhanced closed-loop speed tracking of a DC–DC buck power converter fed Permanent Magnet DC motor (PMDC) motor in face of large exogenous load torque uncertainty. The proposed architecture combines a new self learning Zernike radial polynomial neural network (ZRNN) estimator with the backstepping controller. The design involves a computationally simple online learning based ZRNN to rapidly and accurately estimate the unknown large load torque uncertainties. The proposed control solution concurrently guarantees stability and excellent dynamic performance through an effective neural network based estimation and subsequent compensation of unanticipated load torque perturbations over a wide range. The closed loop stability of the DC–DC buck power converter driven PMDC motor and asymptotic speed tracking with the proposed neuro-adaptive controller is proved using the stability theory for non-autonomous systems. The effectiveness of the proposed controller has been investigated through experimentation on an indigenously developed laboratory prototype of 200 W under closed loop operation using digital signal processors. The tests conducted around different operating conditions include the motor start-up response, step variations in the load torque, and step changes in the reference speed. Experimental results demonstrate a significant improvement in the speed tracking performance achieving <span>\\\\(48.13 \\\\%\\\\)</span> reduction in the settling time and no-change in speed during start-up and load torque perturbations upto <span>\\\\(600\\\\%\\\\)</span>, respectively. Experimental validations and extensive tests spanning over a large operating region, substantiate the theoretical claims and real-time suitability of the proposed controller for sensitive applications demanding high performance.</p>\",\"PeriodicalId\":50546,\"journal\":{\"name\":\"Electrical Engineering\",\"volume\":\"390 1\",\"pages\":\"\"},\"PeriodicalIF\":1.6000,\"publicationDate\":\"2024-08-21\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Electrical Engineering\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s00202-024-02659-3\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Electrical Engineering","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s00202-024-02659-3","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Zernike radial basis neural network control of DC–DC power converter driven permanent magnet DC motor: design and experimental validation
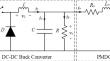
This article presents a novel control architecture for an enhanced closed-loop speed tracking of a DC–DC buck power converter fed Permanent Magnet DC motor (PMDC) motor in face of large exogenous load torque uncertainty. The proposed architecture combines a new self learning Zernike radial polynomial neural network (ZRNN) estimator with the backstepping controller. The design involves a computationally simple online learning based ZRNN to rapidly and accurately estimate the unknown large load torque uncertainties. The proposed control solution concurrently guarantees stability and excellent dynamic performance through an effective neural network based estimation and subsequent compensation of unanticipated load torque perturbations over a wide range. The closed loop stability of the DC–DC buck power converter driven PMDC motor and asymptotic speed tracking with the proposed neuro-adaptive controller is proved using the stability theory for non-autonomous systems. The effectiveness of the proposed controller has been investigated through experimentation on an indigenously developed laboratory prototype of 200 W under closed loop operation using digital signal processors. The tests conducted around different operating conditions include the motor start-up response, step variations in the load torque, and step changes in the reference speed. Experimental results demonstrate a significant improvement in the speed tracking performance achieving \(48.13 \%\) reduction in the settling time and no-change in speed during start-up and load torque perturbations upto \(600\%\), respectively. Experimental validations and extensive tests spanning over a large operating region, substantiate the theoretical claims and real-time suitability of the proposed controller for sensitive applications demanding high performance.
期刊介绍:
The journal “Electrical Engineering” following the long tradition of Archiv für Elektrotechnik publishes original papers of archival value in electrical engineering with a strong focus on electric power systems, smart grid approaches to power transmission and distribution, power system planning, operation and control, electricity markets, renewable power generation, microgrids, power electronics, electrical machines and drives, electric vehicles, railway electrification systems and electric transportation infrastructures, energy storage in electric power systems and vehicles, high voltage engineering, electromagnetic transients in power networks, lightning protection, electrical safety, electrical insulation systems, apparatus, devices, and components. Manuscripts describing theoretical, computer application and experimental research results are welcomed.
Electrical Engineering - Archiv für Elektrotechnik is published in agreement with Verband der Elektrotechnik Elektronik Informationstechnik eV (VDE).

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


