Hoang T. Tran , Dong TL. Tran , Minh T. Nguyen , Thang C. Vu
{"title":"用于医院传染病治疗的智能移动机器人","authors":"Hoang T. Tran , Dong TL. Tran , Minh T. Nguyen , Thang C. Vu","doi":"10.1016/j.mex.2024.102941","DOIUrl":null,"url":null,"abstract":"<div><p>This paper provides a novel and applicable work that builds a real system for disinfecting the air and surfaces of the environment in a hospital room, with a non-contact measurement system for supporting contagious disease treatments in hospitals. The system is built on an intelligent mobile robot system that operates autonomously in a simulated real treatment room. The research team uses a new positioning algorithm. It is a combination of data from the Lidar sensor, encoder, and Extended Kalman filter. The program that applies segmentation and image feature extraction algorithms is developed to meet requirements of real-time environment mapping in the room. Control algorithms for moving and avoiding obstacles are also proposed. Next, techniques for collecting health data including patient identification, body temperature, and blood oxygen index via wireless sensor network are also mentioned in the article. Analysis and experimental results show qualified outcomes and promise. The main contribution of the paper can be listed as follows.</p><ul><li><span>•</span><span><p>Design and build a new CEE-IMR, an intelligent mobile robot that can regconize patients, guide and lead them walking in hospitals, especially keep a safe distance avoiding contagious deseases.</p></span></li><li><span>•</span><span><p>A novel framework for controlling the robot is proposed. The robot can move flexible, avoid obstacles, etc. based on advanced control algorithms. A new control mechanism is also proposed.</p></span></li><li><span>•</span><span><p>Methods of collecting data and processing medical data to support either patients or doctors to improve the effecency in hospitals in contagious disease management.</p></span></li></ul></div>","PeriodicalId":18446,"journal":{"name":"MethodsX","volume":"13 ","pages":"Article 102941"},"PeriodicalIF":1.6000,"publicationDate":"2024-09-04","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S2215016124003923/pdfft?md5=66ec86dad8911e2e4cd33c5385b8282b&pid=1-s2.0-S2215016124003923-main.pdf","citationCount":"0","resultStr":"{\"title\":\"Intelligent mobile robot for contagious disease treatments in hospitals\",\"authors\":\"Hoang T. Tran , Dong TL. Tran , Minh T. Nguyen , Thang C. Vu\",\"doi\":\"10.1016/j.mex.2024.102941\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>This paper provides a novel and applicable work that builds a real system for disinfecting the air and surfaces of the environment in a hospital room, with a non-contact measurement system for supporting contagious disease treatments in hospitals. The system is built on an intelligent mobile robot system that operates autonomously in a simulated real treatment room. The research team uses a new positioning algorithm. It is a combination of data from the Lidar sensor, encoder, and Extended Kalman filter. The program that applies segmentation and image feature extraction algorithms is developed to meet requirements of real-time environment mapping in the room. Control algorithms for moving and avoiding obstacles are also proposed. Next, techniques for collecting health data including patient identification, body temperature, and blood oxygen index via wireless sensor network are also mentioned in the article. Analysis and experimental results show qualified outcomes and promise. The main contribution of the paper can be listed as follows.</p><ul><li><span>•</span><span><p>Design and build a new CEE-IMR, an intelligent mobile robot that can regconize patients, guide and lead them walking in hospitals, especially keep a safe distance avoiding contagious deseases.</p></span></li><li><span>•</span><span><p>A novel framework for controlling the robot is proposed. The robot can move flexible, avoid obstacles, etc. based on advanced control algorithms. A new control mechanism is also proposed.</p></span></li><li><span>•</span><span><p>Methods of collecting data and processing medical data to support either patients or doctors to improve the effecency in hospitals in contagious disease management.</p></span></li></ul></div>\",\"PeriodicalId\":18446,\"journal\":{\"name\":\"MethodsX\",\"volume\":\"13 \",\"pages\":\"Article 102941\"},\"PeriodicalIF\":1.6000,\"publicationDate\":\"2024-09-04\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S2215016124003923/pdfft?md5=66ec86dad8911e2e4cd33c5385b8282b&pid=1-s2.0-S2215016124003923-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"MethodsX\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2215016124003923\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"MULTIDISCIPLINARY SCIENCES\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"MethodsX","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2215016124003923","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MULTIDISCIPLINARY SCIENCES","Score":null,"Total":0}
Intelligent mobile robot for contagious disease treatments in hospitals
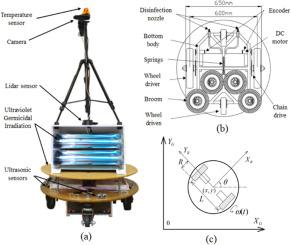
This paper provides a novel and applicable work that builds a real system for disinfecting the air and surfaces of the environment in a hospital room, with a non-contact measurement system for supporting contagious disease treatments in hospitals. The system is built on an intelligent mobile robot system that operates autonomously in a simulated real treatment room. The research team uses a new positioning algorithm. It is a combination of data from the Lidar sensor, encoder, and Extended Kalman filter. The program that applies segmentation and image feature extraction algorithms is developed to meet requirements of real-time environment mapping in the room. Control algorithms for moving and avoiding obstacles are also proposed. Next, techniques for collecting health data including patient identification, body temperature, and blood oxygen index via wireless sensor network are also mentioned in the article. Analysis and experimental results show qualified outcomes and promise. The main contribution of the paper can be listed as follows.
•
Design and build a new CEE-IMR, an intelligent mobile robot that can regconize patients, guide and lead them walking in hospitals, especially keep a safe distance avoiding contagious deseases.
•
A novel framework for controlling the robot is proposed. The robot can move flexible, avoid obstacles, etc. based on advanced control algorithms. A new control mechanism is also proposed.
•
Methods of collecting data and processing medical data to support either patients or doctors to improve the effecency in hospitals in contagious disease management.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


