Rui Zheng , Zuo Jiang , Yibin Ye , Yang Ren , Hui Zeng , Junwei Li , Zhiyuan Zhang
{"title":"融合光探测与测距高度切片鸟瞰图和视觉的自适应网络用于地点识别","authors":"Rui Zheng , Zuo Jiang , Yibin Ye , Yang Ren , Hui Zeng , Junwei Li , Zhiyuan Zhang","doi":"10.1016/j.engappai.2024.109230","DOIUrl":null,"url":null,"abstract":"<div><p>Place recognition, a fundamental component of robotic perception, aims to identify previously visited locations within an environment. In this study, we present a novel global descriptor that uses height-sliced Bird’s Eye View (BEV) from Light Detection and Ranging (LiDAR) and vision images, to facilitate high-recall place recognition in autonomous driving field. Our descriptor generation network, incorporates an adaptive weights generation branch to learn weights of visual and LiDAR features, enhancing its adaptability to different environments. The generated descriptor exhibits excellent yaw-invariance. The entire network is trained using a self-designed quadruplet loss, which discriminates inter-class boundaries and alleviates overfitting to one particular modality. We evaluate our approach on three benchmarks derived from two public datasets and achieve optimal performance on these evaluation sets. Our approach demonstrates excellent generalization ability and efficient runtime, which are indicative of its practical viability in real-world scenarios. For those interested in applying this Artificial Intelligence contribution to engineering, the implementation of our approach can be found at: <span><span>https://github.com/Bryan-ZhengRui/LocFuse</span><svg><path></path></svg></span>.</p></div>","PeriodicalId":50523,"journal":{"name":"Engineering Applications of Artificial Intelligence","volume":"137 ","pages":"Article 109230"},"PeriodicalIF":7.5000,"publicationDate":"2024-09-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"An adaptive network fusing light detection and ranging height-sliced bird’s-eye view and vision for place recognition\",\"authors\":\"Rui Zheng , Zuo Jiang , Yibin Ye , Yang Ren , Hui Zeng , Junwei Li , Zhiyuan Zhang\",\"doi\":\"10.1016/j.engappai.2024.109230\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Place recognition, a fundamental component of robotic perception, aims to identify previously visited locations within an environment. In this study, we present a novel global descriptor that uses height-sliced Bird’s Eye View (BEV) from Light Detection and Ranging (LiDAR) and vision images, to facilitate high-recall place recognition in autonomous driving field. Our descriptor generation network, incorporates an adaptive weights generation branch to learn weights of visual and LiDAR features, enhancing its adaptability to different environments. The generated descriptor exhibits excellent yaw-invariance. The entire network is trained using a self-designed quadruplet loss, which discriminates inter-class boundaries and alleviates overfitting to one particular modality. We evaluate our approach on three benchmarks derived from two public datasets and achieve optimal performance on these evaluation sets. Our approach demonstrates excellent generalization ability and efficient runtime, which are indicative of its practical viability in real-world scenarios. For those interested in applying this Artificial Intelligence contribution to engineering, the implementation of our approach can be found at: <span><span>https://github.com/Bryan-ZhengRui/LocFuse</span><svg><path></path></svg></span>.</p></div>\",\"PeriodicalId\":50523,\"journal\":{\"name\":\"Engineering Applications of Artificial Intelligence\",\"volume\":\"137 \",\"pages\":\"Article 109230\"},\"PeriodicalIF\":7.5000,\"publicationDate\":\"2024-09-05\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Engineering Applications of Artificial Intelligence\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0952197624013885\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Engineering Applications of Artificial Intelligence","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0952197624013885","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
An adaptive network fusing light detection and ranging height-sliced bird’s-eye view and vision for place recognition
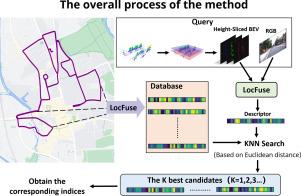
Place recognition, a fundamental component of robotic perception, aims to identify previously visited locations within an environment. In this study, we present a novel global descriptor that uses height-sliced Bird’s Eye View (BEV) from Light Detection and Ranging (LiDAR) and vision images, to facilitate high-recall place recognition in autonomous driving field. Our descriptor generation network, incorporates an adaptive weights generation branch to learn weights of visual and LiDAR features, enhancing its adaptability to different environments. The generated descriptor exhibits excellent yaw-invariance. The entire network is trained using a self-designed quadruplet loss, which discriminates inter-class boundaries and alleviates overfitting to one particular modality. We evaluate our approach on three benchmarks derived from two public datasets and achieve optimal performance on these evaluation sets. Our approach demonstrates excellent generalization ability and efficient runtime, which are indicative of its practical viability in real-world scenarios. For those interested in applying this Artificial Intelligence contribution to engineering, the implementation of our approach can be found at: https://github.com/Bryan-ZhengRui/LocFuse.
期刊介绍:
Artificial Intelligence (AI) is pivotal in driving the fourth industrial revolution, witnessing remarkable advancements across various machine learning methodologies. AI techniques have become indispensable tools for practicing engineers, enabling them to tackle previously insurmountable challenges. Engineering Applications of Artificial Intelligence serves as a global platform for the swift dissemination of research elucidating the practical application of AI methods across all engineering disciplines. Submitted papers are expected to present novel aspects of AI utilized in real-world engineering applications, validated using publicly available datasets to ensure the replicability of research outcomes. Join us in exploring the transformative potential of AI in engineering.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


