{"title":"从人类演示中学习微型螺旋机器人的自动导航控制技能","authors":"","doi":"10.1016/j.engappai.2024.109187","DOIUrl":null,"url":null,"abstract":"<div><p>Magnetic micro-robotic technology holds immense potential for revolutionizing minimally invasive procedures, particularly in the realm of interventional medicine. The ability to effectively and precisely control micro-scale, magnetically actuated robots in real-world scenarios is important. Mastering this capability promises to elevate the precision and efficacy of medical interventions, thereby enhancing patient outcomes. Numerous methods were proposed in previous work and achieved significant progress. However, these efforts primarily focused on model-based strategies and control improvements, with little attention given to the manipulation of the surgeon. This paper presents an exploration of an imitation learning approach, leveraging extensive manual operation experiments, to replicate the task of robotic navigation in simulated vascular environments. The control strategies are directly acquired from experimental observations and encapsulated within a high-dimensional neural network, specifically a tailored variant of the Residual Network (ResNet). The robustness and effectiveness of our proposed methodology are validated through comprehensive experimentation. In automatic navigation trials, the average error spanned from 2.29 mm to 3.32 mm, leading to a mean trajectory deviation of approximately 2.92 mm. The average error rate is 31% lower than that observed in traditional model-based Proportional Integral Derivative (PID) controller (approximately 3.81 mm). In addition, the maximum error (4.87 mm) is 83% of that of the traditional method (5.85 mm). Our findings emphasize the viability and benefits of learning-based techniques in micro-robot control, paving the way for innovative control strategies in interventional surgeries applications.</p></div>","PeriodicalId":50523,"journal":{"name":"Engineering Applications of Artificial Intelligence","volume":null,"pages":null},"PeriodicalIF":7.5000,"publicationDate":"2024-08-31","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Learning automatic navigation control skills for miniature helical robots from human demonstrations\",\"authors\":\"\",\"doi\":\"10.1016/j.engappai.2024.109187\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Magnetic micro-robotic technology holds immense potential for revolutionizing minimally invasive procedures, particularly in the realm of interventional medicine. The ability to effectively and precisely control micro-scale, magnetically actuated robots in real-world scenarios is important. Mastering this capability promises to elevate the precision and efficacy of medical interventions, thereby enhancing patient outcomes. Numerous methods were proposed in previous work and achieved significant progress. However, these efforts primarily focused on model-based strategies and control improvements, with little attention given to the manipulation of the surgeon. This paper presents an exploration of an imitation learning approach, leveraging extensive manual operation experiments, to replicate the task of robotic navigation in simulated vascular environments. The control strategies are directly acquired from experimental observations and encapsulated within a high-dimensional neural network, specifically a tailored variant of the Residual Network (ResNet). The robustness and effectiveness of our proposed methodology are validated through comprehensive experimentation. In automatic navigation trials, the average error spanned from 2.29 mm to 3.32 mm, leading to a mean trajectory deviation of approximately 2.92 mm. The average error rate is 31% lower than that observed in traditional model-based Proportional Integral Derivative (PID) controller (approximately 3.81 mm). In addition, the maximum error (4.87 mm) is 83% of that of the traditional method (5.85 mm). Our findings emphasize the viability and benefits of learning-based techniques in micro-robot control, paving the way for innovative control strategies in interventional surgeries applications.</p></div>\",\"PeriodicalId\":50523,\"journal\":{\"name\":\"Engineering Applications of Artificial Intelligence\",\"volume\":null,\"pages\":null},\"PeriodicalIF\":7.5000,\"publicationDate\":\"2024-08-31\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Engineering Applications of Artificial Intelligence\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0952197624013459\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Engineering Applications of Artificial Intelligence","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0952197624013459","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Learning automatic navigation control skills for miniature helical robots from human demonstrations
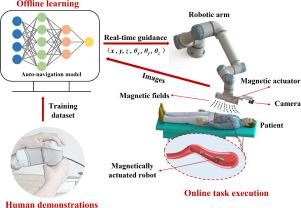
Magnetic micro-robotic technology holds immense potential for revolutionizing minimally invasive procedures, particularly in the realm of interventional medicine. The ability to effectively and precisely control micro-scale, magnetically actuated robots in real-world scenarios is important. Mastering this capability promises to elevate the precision and efficacy of medical interventions, thereby enhancing patient outcomes. Numerous methods were proposed in previous work and achieved significant progress. However, these efforts primarily focused on model-based strategies and control improvements, with little attention given to the manipulation of the surgeon. This paper presents an exploration of an imitation learning approach, leveraging extensive manual operation experiments, to replicate the task of robotic navigation in simulated vascular environments. The control strategies are directly acquired from experimental observations and encapsulated within a high-dimensional neural network, specifically a tailored variant of the Residual Network (ResNet). The robustness and effectiveness of our proposed methodology are validated through comprehensive experimentation. In automatic navigation trials, the average error spanned from 2.29 mm to 3.32 mm, leading to a mean trajectory deviation of approximately 2.92 mm. The average error rate is 31% lower than that observed in traditional model-based Proportional Integral Derivative (PID) controller (approximately 3.81 mm). In addition, the maximum error (4.87 mm) is 83% of that of the traditional method (5.85 mm). Our findings emphasize the viability and benefits of learning-based techniques in micro-robot control, paving the way for innovative control strategies in interventional surgeries applications.
期刊介绍:
Artificial Intelligence (AI) is pivotal in driving the fourth industrial revolution, witnessing remarkable advancements across various machine learning methodologies. AI techniques have become indispensable tools for practicing engineers, enabling them to tackle previously insurmountable challenges. Engineering Applications of Artificial Intelligence serves as a global platform for the swift dissemination of research elucidating the practical application of AI methods across all engineering disciplines. Submitted papers are expected to present novel aspects of AI utilized in real-world engineering applications, validated using publicly available datasets to ensure the replicability of research outcomes. Join us in exploring the transformative potential of AI in engineering.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


