Shamanth Shanmuga Prasad, Ulfah Khairiyah Luthfiyani, Youngwoo Kim
{"title":"利用机器人辅助训练平台(RATP)根据地面接触适应性修改步态。","authors":"Shamanth Shanmuga Prasad, Ulfah Khairiyah Luthfiyani, Youngwoo Kim","doi":"10.1007/s11517-024-03176-y","DOIUrl":null,"url":null,"abstract":"<p><p>Robot-assisted rehabilitation and training systems are utilized to improve the functional recovery of individuals with mobility limitations. These systems offer structured rehabilitation through precise human-robot interaction, outperforming traditional physical therapy by delivering advantages such as targeted muscle recovery, optimization of walking patterns, and automated training routines tailored to the user's objectives and musculoskeletal attributes. In our research, we propose the development of a walking simulator that considers user-specific musculoskeletal information to replicate natural walking dynamics, accounting for factors like joint angles, muscular forces, internal user-specific constraints, and external environmental factors. The integration of these factors into robot-assisted training can provide a more realistic rehabilitation environment and serve as a foundation for achieving natural bipedal locomotion. Our research team has developed a robot-assisted training platform (RATP) that generates gait training sets based on user-specific internal and external constraints by incorporating a genetic algorithm (GA). We utilize the Lagrangian multipliers to accommodate requirements from the rehabilitation field to instantly reshape the gait patterns while maintaining their overall characteristics, without an additional gait pattern search process. Depending on the patient's rehabilitation progress, there are times when it is necessary to reorganize the training session by changing training conditions such as terrain conditions, walking speed, and joint range of motion. The proposed method allows gait rehabilitation to be performed while stably satisfying ground contact constraints, even after modifying the training parameters.</p>","PeriodicalId":49840,"journal":{"name":"Medical & Biological Engineering & Computing","volume":" ","pages":"111-125"},"PeriodicalIF":2.6000,"publicationDate":"2025-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Gait pattern modification based on ground contact adaptation using the robot-assisted training platform (RATP).\",\"authors\":\"Shamanth Shanmuga Prasad, Ulfah Khairiyah Luthfiyani, Youngwoo Kim\",\"doi\":\"10.1007/s11517-024-03176-y\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Robot-assisted rehabilitation and training systems are utilized to improve the functional recovery of individuals with mobility limitations. These systems offer structured rehabilitation through precise human-robot interaction, outperforming traditional physical therapy by delivering advantages such as targeted muscle recovery, optimization of walking patterns, and automated training routines tailored to the user's objectives and musculoskeletal attributes. In our research, we propose the development of a walking simulator that considers user-specific musculoskeletal information to replicate natural walking dynamics, accounting for factors like joint angles, muscular forces, internal user-specific constraints, and external environmental factors. The integration of these factors into robot-assisted training can provide a more realistic rehabilitation environment and serve as a foundation for achieving natural bipedal locomotion. Our research team has developed a robot-assisted training platform (RATP) that generates gait training sets based on user-specific internal and external constraints by incorporating a genetic algorithm (GA). We utilize the Lagrangian multipliers to accommodate requirements from the rehabilitation field to instantly reshape the gait patterns while maintaining their overall characteristics, without an additional gait pattern search process. Depending on the patient's rehabilitation progress, there are times when it is necessary to reorganize the training session by changing training conditions such as terrain conditions, walking speed, and joint range of motion. The proposed method allows gait rehabilitation to be performed while stably satisfying ground contact constraints, even after modifying the training parameters.</p>\",\"PeriodicalId\":49840,\"journal\":{\"name\":\"Medical & Biological Engineering & Computing\",\"volume\":\" \",\"pages\":\"111-125\"},\"PeriodicalIF\":2.6000,\"publicationDate\":\"2025-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Medical & Biological Engineering & Computing\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s11517-024-03176-y\",\"RegionNum\":4,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/8/17 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Medical & Biological Engineering & Computing","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s11517-024-03176-y","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/8/17 0:00:00","PubModel":"Epub","JCR":"Q2","JCRName":"COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS","Score":null,"Total":0}
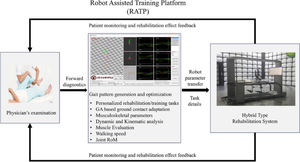
Gait pattern modification based on ground contact adaptation using the robot-assisted training platform (RATP).
Robot-assisted rehabilitation and training systems are utilized to improve the functional recovery of individuals with mobility limitations. These systems offer structured rehabilitation through precise human-robot interaction, outperforming traditional physical therapy by delivering advantages such as targeted muscle recovery, optimization of walking patterns, and automated training routines tailored to the user's objectives and musculoskeletal attributes. In our research, we propose the development of a walking simulator that considers user-specific musculoskeletal information to replicate natural walking dynamics, accounting for factors like joint angles, muscular forces, internal user-specific constraints, and external environmental factors. The integration of these factors into robot-assisted training can provide a more realistic rehabilitation environment and serve as a foundation for achieving natural bipedal locomotion. Our research team has developed a robot-assisted training platform (RATP) that generates gait training sets based on user-specific internal and external constraints by incorporating a genetic algorithm (GA). We utilize the Lagrangian multipliers to accommodate requirements from the rehabilitation field to instantly reshape the gait patterns while maintaining their overall characteristics, without an additional gait pattern search process. Depending on the patient's rehabilitation progress, there are times when it is necessary to reorganize the training session by changing training conditions such as terrain conditions, walking speed, and joint range of motion. The proposed method allows gait rehabilitation to be performed while stably satisfying ground contact constraints, even after modifying the training parameters.
期刊介绍:
Founded in 1963, Medical & Biological Engineering & Computing (MBEC) continues to serve the biomedical engineering community, covering the entire spectrum of biomedical and clinical engineering. The journal presents exciting and vital experimental and theoretical developments in biomedical science and technology, and reports on advances in computer-based methodologies in these multidisciplinary subjects. The journal also incorporates new and evolving technologies including cellular engineering and molecular imaging.
MBEC publishes original research articles as well as reviews and technical notes. Its Rapid Communications category focuses on material of immediate value to the readership, while the Controversies section provides a forum to exchange views on selected issues, stimulating a vigorous and informed debate in this exciting and high profile field.
MBEC is an official journal of the International Federation of Medical and Biological Engineering (IFMBE).

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


