{"title":"基于复杂环境下石榴疏果前只看一次的轻量级模型","authors":"Yurong Du , Youpan Han , Yaoheng Su , Jiuxin Wang","doi":"10.1016/j.engappai.2024.109123","DOIUrl":null,"url":null,"abstract":"<div><p>Using picking robot to thin pomegranate, the accuracy and speed for the algorithm are very significant, especially in complex environments. Therefore, a detection method TP-YOLO (Thinning pomegranate-YOLO) is proposed through model lightweighting and improvement in recognition accuracy based on You Only Look Once Version 8 (YOLOv8s). The lightweighting of the model aspect ShuffleNetV2 is firstly introduced to reconstruct the backbone of YOLOv8s, and the standard convolution of Neck is replaced by depthwise separable convolution. Then the feature level of the model is modified. The improvement in recognition accuracy is mainly achieved by replacing the residual structure of ShuffleNetV2 with ShuffleNetV2-SE, which includes Squeeze-and-Excitatio (SE) attention mechanism. Then, the proposed algorithm is trained and tested with self-built pomegranate dataset before fruit thinning. Moreover, TP-YOLO is embedded into the self-built pomegranate growth status detection platform. The experimental results indicate that the Mean Average Precision (mAP), Size, Giga Floating-point Operations Per Second (GFlops) of TP-YOLO model are 94.4%, 1.9 MB, 8.5, respectively. Furthermore, compared with the latest research results, the number of parameters of our algorithm is reduced by 67.9% while there is no decrease in the detection accuracy. This provides a research foundation for fruit picking robots application to the automation and intelligent development of the pomegranate industry.</p></div>","PeriodicalId":50523,"journal":{"name":"Engineering Applications of Artificial Intelligence","volume":"137 ","pages":"Article 109123"},"PeriodicalIF":7.5000,"publicationDate":"2024-08-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"A lightweight model based on you only look once for pomegranate before fruit thinning in complex environment\",\"authors\":\"Yurong Du , Youpan Han , Yaoheng Su , Jiuxin Wang\",\"doi\":\"10.1016/j.engappai.2024.109123\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Using picking robot to thin pomegranate, the accuracy and speed for the algorithm are very significant, especially in complex environments. Therefore, a detection method TP-YOLO (Thinning pomegranate-YOLO) is proposed through model lightweighting and improvement in recognition accuracy based on You Only Look Once Version 8 (YOLOv8s). The lightweighting of the model aspect ShuffleNetV2 is firstly introduced to reconstruct the backbone of YOLOv8s, and the standard convolution of Neck is replaced by depthwise separable convolution. Then the feature level of the model is modified. The improvement in recognition accuracy is mainly achieved by replacing the residual structure of ShuffleNetV2 with ShuffleNetV2-SE, which includes Squeeze-and-Excitatio (SE) attention mechanism. Then, the proposed algorithm is trained and tested with self-built pomegranate dataset before fruit thinning. Moreover, TP-YOLO is embedded into the self-built pomegranate growth status detection platform. The experimental results indicate that the Mean Average Precision (mAP), Size, Giga Floating-point Operations Per Second (GFlops) of TP-YOLO model are 94.4%, 1.9 MB, 8.5, respectively. Furthermore, compared with the latest research results, the number of parameters of our algorithm is reduced by 67.9% while there is no decrease in the detection accuracy. This provides a research foundation for fruit picking robots application to the automation and intelligent development of the pomegranate industry.</p></div>\",\"PeriodicalId\":50523,\"journal\":{\"name\":\"Engineering Applications of Artificial Intelligence\",\"volume\":\"137 \",\"pages\":\"Article 109123\"},\"PeriodicalIF\":7.5000,\"publicationDate\":\"2024-08-09\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Engineering Applications of Artificial Intelligence\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0952197624012818\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Engineering Applications of Artificial Intelligence","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0952197624012818","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
摘要
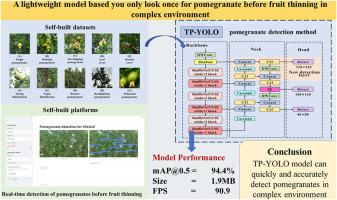
使用采摘机器人对石榴进行疏果,对算法的准确性和速度要求非常高,尤其是在复杂环境中。因此,基于YOLOv8s(You Only Look Once Version 8),通过模型轻量化和提高识别精度,提出了一种检测方法TP-YOLO(Thinning pomegranate-YOLO)。首先引入 ShuffleNetV2 模型的轻量化来重构 YOLOv8s 的骨干,并将 Neck 的标准卷积替换为深度可分离卷积。然后对模型的特征层进行修改。识别准确率的提高主要是通过用 ShuffleNetV2-SE 代替 ShuffleNetV2 的残差结构来实现的,ShuffleNetV2-SE 包含挤压和兴奋(SE)注意机制。然后,利用自建的石榴数据集对所提出的算法进行了训练和测试,然后再对其进行果实瘦身。此外,还将 TP-YOLO 嵌入到自建的石榴生长状态检测平台中。实验结果表明,TP-YOLO 模型的平均精度(mAP)、大小、每秒千兆浮点运算(GFlops)分别为 94.4%、1.9 MB、8.5。此外,与最新研究成果相比,我们的算法参数数量减少了 67.9%,而检测精度却没有降低。这为水果采摘机器人应用于石榴产业的自动化和智能化发展提供了研究基础。
A lightweight model based on you only look once for pomegranate before fruit thinning in complex environment
Using picking robot to thin pomegranate, the accuracy and speed for the algorithm are very significant, especially in complex environments. Therefore, a detection method TP-YOLO (Thinning pomegranate-YOLO) is proposed through model lightweighting and improvement in recognition accuracy based on You Only Look Once Version 8 (YOLOv8s). The lightweighting of the model aspect ShuffleNetV2 is firstly introduced to reconstruct the backbone of YOLOv8s, and the standard convolution of Neck is replaced by depthwise separable convolution. Then the feature level of the model is modified. The improvement in recognition accuracy is mainly achieved by replacing the residual structure of ShuffleNetV2 with ShuffleNetV2-SE, which includes Squeeze-and-Excitatio (SE) attention mechanism. Then, the proposed algorithm is trained and tested with self-built pomegranate dataset before fruit thinning. Moreover, TP-YOLO is embedded into the self-built pomegranate growth status detection platform. The experimental results indicate that the Mean Average Precision (mAP), Size, Giga Floating-point Operations Per Second (GFlops) of TP-YOLO model are 94.4%, 1.9 MB, 8.5, respectively. Furthermore, compared with the latest research results, the number of parameters of our algorithm is reduced by 67.9% while there is no decrease in the detection accuracy. This provides a research foundation for fruit picking robots application to the automation and intelligent development of the pomegranate industry.
期刊介绍:
Artificial Intelligence (AI) is pivotal in driving the fourth industrial revolution, witnessing remarkable advancements across various machine learning methodologies. AI techniques have become indispensable tools for practicing engineers, enabling them to tackle previously insurmountable challenges. Engineering Applications of Artificial Intelligence serves as a global platform for the swift dissemination of research elucidating the practical application of AI methods across all engineering disciplines. Submitted papers are expected to present novel aspects of AI utilized in real-world engineering applications, validated using publicly available datasets to ensure the replicability of research outcomes. Join us in exploring the transformative potential of AI in engineering.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


