Fangyan Zheng, Shuai Xin, Xinghui Han, Lin Hua, Wuhao Zhuang, Xuan Hu, Fang Chai
{"title":"重载 Nonapod:用于多工件成形工艺的新型柔性冗余并联运动学机器","authors":"Fangyan Zheng, Shuai Xin, Xinghui Han, Lin Hua, Wuhao Zhuang, Xuan Hu, Fang Chai","doi":"10.1016/j.ijmachtools.2024.104183","DOIUrl":null,"url":null,"abstract":"<div><p>The high-performance multi-DoF forming process (MDFP) necessitates a 6-DoF forming machine tool with high normal and lateral stiffness to bear large normal and lateral forming force of millions of Newton (MN). However, the payload of parallel kinematic machine (PKM) is generally limited to thousands of Newton (kN), which restricts its application in MDFP. Therefore, this paper aims to develop a novel heavy load PKM with high stiffness for MDFP. To maximise the normal stiffness, a 6-PSS PKM with zero base angle and horizontal driver is proposed. Further, the inner force transfer model of 6-PSS PKM is established, indicating that the normal stiffness will be maximised when the link force approaches to be vertical. Consequently, a design criterion for maximising normal stiffness, i.e., the root mean square error (RMSE) for horizontal projection of all links should be minimised, is established. To maximise the lateral stiffness, general force balance equations of 6-PSS PKM are derived, indicating that lateral force can cause unintended negative force of links, significantly reducing the lateral stiffness. Thus, a novel auxiliary 3-SPS configuration is employed to provide additional force system to mitigate this negative force via hydraulic links. Correspondingly, a design criterion for maximising lateral stiffness, i.e., all link force should remain positive, is proposed. By combining aforementioned design criterion and kinetostatic models, a near-singular 6-PSS PKM with maximising normal stiffness is achieved, and dimension parameters of 3-SPS PKM with maximising lateral stiffness are optimised. On this basis, a novel flexible redundant 6-PSS/3-SPS PKM with both high normal and lateral stiffness is proposed, and a novel heavy load Nonapod with payload of 8 MN and payload-mass ratio of 40 is developed, showing good stiffness performance. The plastic deformation mechanisms of multi-DoF formed aviation bevel gear are revealed, and experimentally formed aviation bevel gear in the new Nonapod achieves good accuracy, microstructure and mechanical performance. This work provides a new methodology for synthesis of heavy load PKM with high normal and lateral stiffness, and has significant application prospect in PKM under heavy load working condition.</p></div>","PeriodicalId":14011,"journal":{"name":"International Journal of Machine Tools & Manufacture","volume":"200 ","pages":"Article 104183"},"PeriodicalIF":18.8000,"publicationDate":"2024-06-30","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Heavy-load Nonapod: A novel flexible redundant parallel kinematic machine for multi-DoF forming process\",\"authors\":\"Fangyan Zheng, Shuai Xin, Xinghui Han, Lin Hua, Wuhao Zhuang, Xuan Hu, Fang Chai\",\"doi\":\"10.1016/j.ijmachtools.2024.104183\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>The high-performance multi-DoF forming process (MDFP) necessitates a 6-DoF forming machine tool with high normal and lateral stiffness to bear large normal and lateral forming force of millions of Newton (MN). However, the payload of parallel kinematic machine (PKM) is generally limited to thousands of Newton (kN), which restricts its application in MDFP. Therefore, this paper aims to develop a novel heavy load PKM with high stiffness for MDFP. To maximise the normal stiffness, a 6-PSS PKM with zero base angle and horizontal driver is proposed. Further, the inner force transfer model of 6-PSS PKM is established, indicating that the normal stiffness will be maximised when the link force approaches to be vertical. Consequently, a design criterion for maximising normal stiffness, i.e., the root mean square error (RMSE) for horizontal projection of all links should be minimised, is established. To maximise the lateral stiffness, general force balance equations of 6-PSS PKM are derived, indicating that lateral force can cause unintended negative force of links, significantly reducing the lateral stiffness. Thus, a novel auxiliary 3-SPS configuration is employed to provide additional force system to mitigate this negative force via hydraulic links. Correspondingly, a design criterion for maximising lateral stiffness, i.e., all link force should remain positive, is proposed. By combining aforementioned design criterion and kinetostatic models, a near-singular 6-PSS PKM with maximising normal stiffness is achieved, and dimension parameters of 3-SPS PKM with maximising lateral stiffness are optimised. On this basis, a novel flexible redundant 6-PSS/3-SPS PKM with both high normal and lateral stiffness is proposed, and a novel heavy load Nonapod with payload of 8 MN and payload-mass ratio of 40 is developed, showing good stiffness performance. The plastic deformation mechanisms of multi-DoF formed aviation bevel gear are revealed, and experimentally formed aviation bevel gear in the new Nonapod achieves good accuracy, microstructure and mechanical performance. This work provides a new methodology for synthesis of heavy load PKM with high normal and lateral stiffness, and has significant application prospect in PKM under heavy load working condition.</p></div>\",\"PeriodicalId\":14011,\"journal\":{\"name\":\"International Journal of Machine Tools & Manufacture\",\"volume\":\"200 \",\"pages\":\"Article 104183\"},\"PeriodicalIF\":18.8000,\"publicationDate\":\"2024-06-30\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Machine Tools & Manufacture\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0890695524000695\",\"RegionNum\":1,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MANUFACTURING\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Machine Tools & Manufacture","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0890695524000695","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MANUFACTURING","Score":null,"Total":0}
Heavy-load Nonapod: A novel flexible redundant parallel kinematic machine for multi-DoF forming process
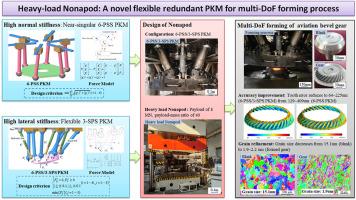
The high-performance multi-DoF forming process (MDFP) necessitates a 6-DoF forming machine tool with high normal and lateral stiffness to bear large normal and lateral forming force of millions of Newton (MN). However, the payload of parallel kinematic machine (PKM) is generally limited to thousands of Newton (kN), which restricts its application in MDFP. Therefore, this paper aims to develop a novel heavy load PKM with high stiffness for MDFP. To maximise the normal stiffness, a 6-PSS PKM with zero base angle and horizontal driver is proposed. Further, the inner force transfer model of 6-PSS PKM is established, indicating that the normal stiffness will be maximised when the link force approaches to be vertical. Consequently, a design criterion for maximising normal stiffness, i.e., the root mean square error (RMSE) for horizontal projection of all links should be minimised, is established. To maximise the lateral stiffness, general force balance equations of 6-PSS PKM are derived, indicating that lateral force can cause unintended negative force of links, significantly reducing the lateral stiffness. Thus, a novel auxiliary 3-SPS configuration is employed to provide additional force system to mitigate this negative force via hydraulic links. Correspondingly, a design criterion for maximising lateral stiffness, i.e., all link force should remain positive, is proposed. By combining aforementioned design criterion and kinetostatic models, a near-singular 6-PSS PKM with maximising normal stiffness is achieved, and dimension parameters of 3-SPS PKM with maximising lateral stiffness are optimised. On this basis, a novel flexible redundant 6-PSS/3-SPS PKM with both high normal and lateral stiffness is proposed, and a novel heavy load Nonapod with payload of 8 MN and payload-mass ratio of 40 is developed, showing good stiffness performance. The plastic deformation mechanisms of multi-DoF formed aviation bevel gear are revealed, and experimentally formed aviation bevel gear in the new Nonapod achieves good accuracy, microstructure and mechanical performance. This work provides a new methodology for synthesis of heavy load PKM with high normal and lateral stiffness, and has significant application prospect in PKM under heavy load working condition.
期刊介绍:
The International Journal of Machine Tools and Manufacture is dedicated to advancing scientific comprehension of the fundamental mechanics involved in processes and machines utilized in the manufacturing of engineering components. While the primary focus is on metals, the journal also explores applications in composites, ceramics, and other structural or functional materials. The coverage includes a diverse range of topics:
- Essential mechanics of processes involving material removal, accretion, and deformation, encompassing solid, semi-solid, or particulate forms.
- Significant scientific advancements in existing or new processes and machines.
- In-depth characterization of workpiece materials (structure/surfaces) through advanced techniques (e.g., SEM, EDS, TEM, EBSD, AES, Raman spectroscopy) to unveil new phenomenological aspects governing manufacturing processes.
- Tool design, utilization, and comprehensive studies of failure mechanisms.
- Innovative concepts of machine tools, fixtures, and tool holders supported by modeling and demonstrations relevant to manufacturing processes within the journal's scope.
- Novel scientific contributions exploring interactions between the machine tool, control system, software design, and processes.
- Studies elucidating specific mechanisms governing niche processes (e.g., ultra-high precision, nano/atomic level manufacturing with either mechanical or non-mechanical "tools").
- Innovative approaches, underpinned by thorough scientific analysis, addressing emerging or breakthrough processes (e.g., bio-inspired manufacturing) and/or applications (e.g., ultra-high precision optics).

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


