{"title":"利用全局-本地场景增强型社会互动图网络进行多机器人轨迹预测","authors":"Xuanqi Lin, Yong Zhang, Shun Wang, Xinglin Piao, Baocai Yin","doi":"10.1002/cav.2237","DOIUrl":null,"url":null,"abstract":"<p>Trajectory prediction is essential for intelligent autonomous systems like autonomous driving, behavior analysis, and service robotics. Deep learning has emerged as the predominant technique due to its superior modeling capability for trajectory data. However, deep learning-based models face challenges in effectively utilizing scene information and accurately modeling agent interactions, largely due to the complexity and uncertainty of real-world scenarios. To mitigate these challenges, this study presents a novel multiagent trajectory prediction model, termed the global-local scene-enhanced social interaction graph network (GLSESIGN), which incorporates two pivotal strategies: global-local scene information utilization and a social adaptive attention graph network. The model hierarchically learns scene information relevant to multiple intelligent agents, thereby enhancing the understanding of complex scenes. Additionally, it adaptively captures social interactions, improving adaptability to diverse interaction patterns through sparse graph structures. This model not only improves the understanding of complex scenes but also accurately predicts future trajectories of multiple intelligent agents by flexibly modeling intricate interactions. Experimental validation on public datasets substantiates the efficacy of the proposed model. This research offers a novel model to address the complexity and uncertainty in multiagent trajectory prediction, providing more accurate predictive support in practical application scenarios.</p>","PeriodicalId":50645,"journal":{"name":"Computer Animation and Virtual Worlds","volume":"35 3","pages":""},"PeriodicalIF":0.9000,"publicationDate":"2024-05-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Multiagent trajectory prediction with global-local scene-enhanced social interaction graph network\",\"authors\":\"Xuanqi Lin, Yong Zhang, Shun Wang, Xinglin Piao, Baocai Yin\",\"doi\":\"10.1002/cav.2237\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Trajectory prediction is essential for intelligent autonomous systems like autonomous driving, behavior analysis, and service robotics. Deep learning has emerged as the predominant technique due to its superior modeling capability for trajectory data. However, deep learning-based models face challenges in effectively utilizing scene information and accurately modeling agent interactions, largely due to the complexity and uncertainty of real-world scenarios. To mitigate these challenges, this study presents a novel multiagent trajectory prediction model, termed the global-local scene-enhanced social interaction graph network (GLSESIGN), which incorporates two pivotal strategies: global-local scene information utilization and a social adaptive attention graph network. The model hierarchically learns scene information relevant to multiple intelligent agents, thereby enhancing the understanding of complex scenes. Additionally, it adaptively captures social interactions, improving adaptability to diverse interaction patterns through sparse graph structures. This model not only improves the understanding of complex scenes but also accurately predicts future trajectories of multiple intelligent agents by flexibly modeling intricate interactions. Experimental validation on public datasets substantiates the efficacy of the proposed model. This research offers a novel model to address the complexity and uncertainty in multiagent trajectory prediction, providing more accurate predictive support in practical application scenarios.</p>\",\"PeriodicalId\":50645,\"journal\":{\"name\":\"Computer Animation and Virtual Worlds\",\"volume\":\"35 3\",\"pages\":\"\"},\"PeriodicalIF\":0.9000,\"publicationDate\":\"2024-05-27\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Computer Animation and Virtual Worlds\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/cav.2237\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"COMPUTER SCIENCE, SOFTWARE ENGINEERING\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Computer Animation and Virtual Worlds","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/cav.2237","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"COMPUTER SCIENCE, SOFTWARE ENGINEERING","Score":null,"Total":0}
Multiagent trajectory prediction with global-local scene-enhanced social interaction graph network
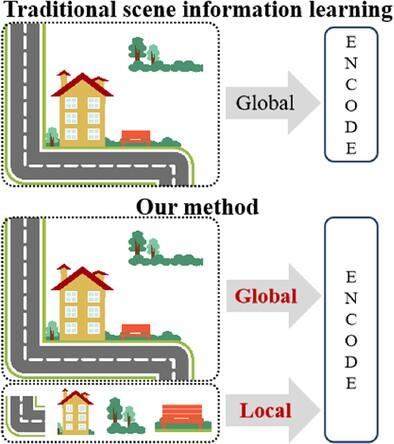
Trajectory prediction is essential for intelligent autonomous systems like autonomous driving, behavior analysis, and service robotics. Deep learning has emerged as the predominant technique due to its superior modeling capability for trajectory data. However, deep learning-based models face challenges in effectively utilizing scene information and accurately modeling agent interactions, largely due to the complexity and uncertainty of real-world scenarios. To mitigate these challenges, this study presents a novel multiagent trajectory prediction model, termed the global-local scene-enhanced social interaction graph network (GLSESIGN), which incorporates two pivotal strategies: global-local scene information utilization and a social adaptive attention graph network. The model hierarchically learns scene information relevant to multiple intelligent agents, thereby enhancing the understanding of complex scenes. Additionally, it adaptively captures social interactions, improving adaptability to diverse interaction patterns through sparse graph structures. This model not only improves the understanding of complex scenes but also accurately predicts future trajectories of multiple intelligent agents by flexibly modeling intricate interactions. Experimental validation on public datasets substantiates the efficacy of the proposed model. This research offers a novel model to address the complexity and uncertainty in multiagent trajectory prediction, providing more accurate predictive support in practical application scenarios.
期刊介绍:
With the advent of very powerful PCs and high-end graphics cards, there has been an incredible development in Virtual Worlds, real-time computer animation and simulation, games. But at the same time, new and cheaper Virtual Reality devices have appeared allowing an interaction with these real-time Virtual Worlds and even with real worlds through Augmented Reality. Three-dimensional characters, especially Virtual Humans are now of an exceptional quality, which allows to use them in the movie industry. But this is only a beginning, as with the development of Artificial Intelligence and Agent technology, these characters will become more and more autonomous and even intelligent. They will inhabit the Virtual Worlds in a Virtual Life together with animals and plants.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


