{"title":"CLaSP: 由合成全景图辅助的跨视角 6-DoF 定位系统","authors":"Juelin Zhu, Shen Yan, Xiaoya Cheng, Rouwan Wu, Yuxiang Liu, Maojun Zhang","doi":"10.1049/cvi2.12285","DOIUrl":null,"url":null,"abstract":"<p>Despite the impressive progress in visual localisation, 6-DoF cross-view localisation is still a challenging task in the computer vision community due to the huge appearance changes. To address this issue, the authors propose the CLaSP, a coarse-to-fine framework, which leverages a synthetic panorama to facilitate cross-view 6-DoF localisation in a large-scale scene. The authors first leverage a segmentation map to correct the prior pose, followed by a synthetic panorama on the ground to enable coarse pose estimation combined with a template matching method. The authors finally formulate the refine localisation process as feature matching and pose refinement to obtain the final result. The authors evaluate the performance of the CLaSP and several state-of-the-art baselines on the <i>Airloc</i> dataset, which demonstrates the effectiveness of our proposed framework.</p>","PeriodicalId":56304,"journal":{"name":"IET Computer Vision","volume":"18 7","pages":"859-874"},"PeriodicalIF":1.5000,"publicationDate":"2024-05-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/cvi2.12285","citationCount":"0","resultStr":"{\"title\":\"CLaSP: Cross-view 6-DoF localisation assisted by synthetic panorama\",\"authors\":\"Juelin Zhu, Shen Yan, Xiaoya Cheng, Rouwan Wu, Yuxiang Liu, Maojun Zhang\",\"doi\":\"10.1049/cvi2.12285\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Despite the impressive progress in visual localisation, 6-DoF cross-view localisation is still a challenging task in the computer vision community due to the huge appearance changes. To address this issue, the authors propose the CLaSP, a coarse-to-fine framework, which leverages a synthetic panorama to facilitate cross-view 6-DoF localisation in a large-scale scene. The authors first leverage a segmentation map to correct the prior pose, followed by a synthetic panorama on the ground to enable coarse pose estimation combined with a template matching method. The authors finally formulate the refine localisation process as feature matching and pose refinement to obtain the final result. The authors evaluate the performance of the CLaSP and several state-of-the-art baselines on the <i>Airloc</i> dataset, which demonstrates the effectiveness of our proposed framework.</p>\",\"PeriodicalId\":56304,\"journal\":{\"name\":\"IET Computer Vision\",\"volume\":\"18 7\",\"pages\":\"859-874\"},\"PeriodicalIF\":1.5000,\"publicationDate\":\"2024-05-13\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/cvi2.12285\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Computer Vision\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/cvi2.12285\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Computer Vision","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/cvi2.12285","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
CLaSP: Cross-view 6-DoF localisation assisted by synthetic panorama
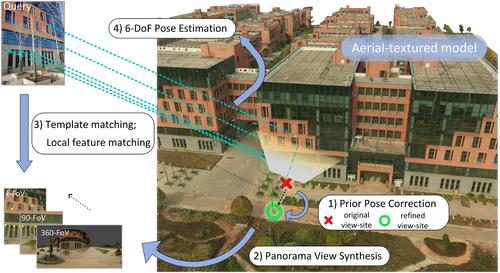
Despite the impressive progress in visual localisation, 6-DoF cross-view localisation is still a challenging task in the computer vision community due to the huge appearance changes. To address this issue, the authors propose the CLaSP, a coarse-to-fine framework, which leverages a synthetic panorama to facilitate cross-view 6-DoF localisation in a large-scale scene. The authors first leverage a segmentation map to correct the prior pose, followed by a synthetic panorama on the ground to enable coarse pose estimation combined with a template matching method. The authors finally formulate the refine localisation process as feature matching and pose refinement to obtain the final result. The authors evaluate the performance of the CLaSP and several state-of-the-art baselines on the Airloc dataset, which demonstrates the effectiveness of our proposed framework.
期刊介绍:
IET Computer Vision seeks original research papers in a wide range of areas of computer vision. The vision of the journal is to publish the highest quality research work that is relevant and topical to the field, but not forgetting those works that aim to introduce new horizons and set the agenda for future avenues of research in computer vision.
IET Computer Vision welcomes submissions on the following topics:
Biologically and perceptually motivated approaches to low level vision (feature detection, etc.);
Perceptual grouping and organisation
Representation, analysis and matching of 2D and 3D shape
Shape-from-X
Object recognition
Image understanding
Learning with visual inputs
Motion analysis and object tracking
Multiview scene analysis
Cognitive approaches in low, mid and high level vision
Control in visual systems
Colour, reflectance and light
Statistical and probabilistic models
Face and gesture
Surveillance
Biometrics and security
Robotics
Vehicle guidance
Automatic model aquisition
Medical image analysis and understanding
Aerial scene analysis and remote sensing
Deep learning models in computer vision
Both methodological and applications orientated papers are welcome.
Manuscripts submitted are expected to include a detailed and analytical review of the literature and state-of-the-art exposition of the original proposed research and its methodology, its thorough experimental evaluation, and last but not least, comparative evaluation against relevant and state-of-the-art methods. Submissions not abiding by these minimum requirements may be returned to authors without being sent to review.
Special Issues Current Call for Papers:
Computer Vision for Smart Cameras and Camera Networks - https://digital-library.theiet.org/files/IET_CVI_SC.pdf
Computer Vision for the Creative Industries - https://digital-library.theiet.org/files/IET_CVI_CVCI.pdf

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


