{"title":"纤巧灵活的水下机器人的设计与结构","authors":"Jia-Lin Wang, Jia-Ling Song, Ai-Rong Liu, Jia-Qiao Liang, Fo-Bao Zhou, Jia-Jian Liang, Ji-Yang Fu, Bing-Cong Chen","doi":"10.1007/s11370-024-00539-0","DOIUrl":null,"url":null,"abstract":"<p>This paper presents the design and analysis of a biomimetic underwater snake-like robot, addressing the main limitations of current underwater robotic systems in terms of maneuverability and adaptability in complex environments. The innovative design incorporates flexible joint modules that significantly enhance the robot’s ability to navigate through narrow and irregular terrains, which is a notable limitation in traditional rigidly connected underwater robots. These flexible joints provide increased degrees of freedom and enable the robot to absorb and release energy, ensuring stability even under external impacts, thus extending the operational lifespan of the robot. Finite element analysis demonstrates the flexible joints’ superior performance in various underwater conditions, offering a greater range of motion and workspace compared to rigid connections. The results indicate that the robot’s modular design, combined with the flexible joint module, leads to improved agility and maneuverability, allowing for precise and intentional operation. The control module, equipped with advanced sensors and a CPU, manages the complex dynamics introduced by the flexible joints, ensuring effective navigation and operation. The specific advantages of this design include the robot’s enhanced structural integrity, its ability to conform to irregular surfaces, and its adaptability to environmental variations. The paper concludes with a discussion on the implications of these findings for the future design and operation of underwater serpentine robots, emphasizing the need for a balance between the effects of elastic modulus and workspace to maximize the benefits of flexible joints.</p>","PeriodicalId":48813,"journal":{"name":"Intelligent Service Robotics","volume":"150 1","pages":""},"PeriodicalIF":4.3000,"publicationDate":"2024-05-06","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Design and architecture of a slender and flexible underwater robot\",\"authors\":\"Jia-Lin Wang, Jia-Ling Song, Ai-Rong Liu, Jia-Qiao Liang, Fo-Bao Zhou, Jia-Jian Liang, Ji-Yang Fu, Bing-Cong Chen\",\"doi\":\"10.1007/s11370-024-00539-0\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>This paper presents the design and analysis of a biomimetic underwater snake-like robot, addressing the main limitations of current underwater robotic systems in terms of maneuverability and adaptability in complex environments. The innovative design incorporates flexible joint modules that significantly enhance the robot’s ability to navigate through narrow and irregular terrains, which is a notable limitation in traditional rigidly connected underwater robots. These flexible joints provide increased degrees of freedom and enable the robot to absorb and release energy, ensuring stability even under external impacts, thus extending the operational lifespan of the robot. Finite element analysis demonstrates the flexible joints’ superior performance in various underwater conditions, offering a greater range of motion and workspace compared to rigid connections. The results indicate that the robot’s modular design, combined with the flexible joint module, leads to improved agility and maneuverability, allowing for precise and intentional operation. The control module, equipped with advanced sensors and a CPU, manages the complex dynamics introduced by the flexible joints, ensuring effective navigation and operation. The specific advantages of this design include the robot’s enhanced structural integrity, its ability to conform to irregular surfaces, and its adaptability to environmental variations. The paper concludes with a discussion on the implications of these findings for the future design and operation of underwater serpentine robots, emphasizing the need for a balance between the effects of elastic modulus and workspace to maximize the benefits of flexible joints.</p>\",\"PeriodicalId\":48813,\"journal\":{\"name\":\"Intelligent Service Robotics\",\"volume\":\"150 1\",\"pages\":\"\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2024-05-06\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Intelligent Service Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s11370-024-00539-0\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Intelligent Service Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s11370-024-00539-0","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ROBOTICS","Score":null,"Total":0}
Design and architecture of a slender and flexible underwater robot
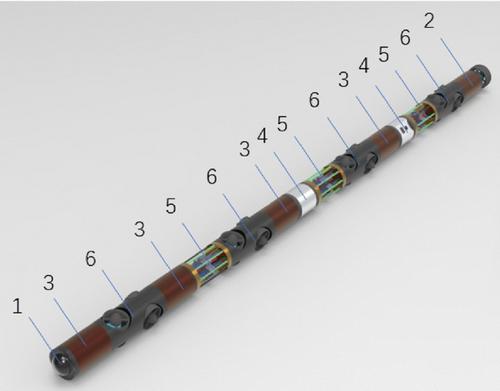
This paper presents the design and analysis of a biomimetic underwater snake-like robot, addressing the main limitations of current underwater robotic systems in terms of maneuverability and adaptability in complex environments. The innovative design incorporates flexible joint modules that significantly enhance the robot’s ability to navigate through narrow and irregular terrains, which is a notable limitation in traditional rigidly connected underwater robots. These flexible joints provide increased degrees of freedom and enable the robot to absorb and release energy, ensuring stability even under external impacts, thus extending the operational lifespan of the robot. Finite element analysis demonstrates the flexible joints’ superior performance in various underwater conditions, offering a greater range of motion and workspace compared to rigid connections. The results indicate that the robot’s modular design, combined with the flexible joint module, leads to improved agility and maneuverability, allowing for precise and intentional operation. The control module, equipped with advanced sensors and a CPU, manages the complex dynamics introduced by the flexible joints, ensuring effective navigation and operation. The specific advantages of this design include the robot’s enhanced structural integrity, its ability to conform to irregular surfaces, and its adaptability to environmental variations. The paper concludes with a discussion on the implications of these findings for the future design and operation of underwater serpentine robots, emphasizing the need for a balance between the effects of elastic modulus and workspace to maximize the benefits of flexible joints.
期刊介绍:
The journal directs special attention to the emerging significance of integrating robotics with information technology and cognitive science (such as ubiquitous and adaptive computing,information integration in a distributed environment, and cognitive modelling for human-robot interaction), which spurs innovation toward a new multi-dimensional robotic service to humans. The journal intends to capture and archive this emerging yet significant advancement in the field of intelligent service robotics. The journal will publish original papers of innovative ideas and concepts, new discoveries and improvements, as well as novel applications and business models which are related to the field of intelligent service robotics described above and are proven to be of high quality. The areas that the Journal will cover include, but are not limited to: Intelligent robots serving humans in daily life or in a hazardous environment, such as home or personal service robots, entertainment robots, education robots, medical robots, healthcare and rehabilitation robots, and rescue robots (Service Robotics); Intelligent robotic functions in the form of embedded systems for applications to, for example, intelligent space, intelligent vehicles and transportation systems, intelligent manufacturing systems, and intelligent medical facilities (Embedded Robotics); The integration of robotics with network technologies, generating such services and solutions as distributed robots, distance robotic education-aides, and virtual laboratories or museums (Networked Robotics).

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


