{"title":"基于地图的自主机器人导航的稳健点云注册","authors":"Amit Efraim, Joseph M. Francos","doi":"10.1186/s13634-024-01153-z","DOIUrl":null,"url":null,"abstract":"<p>Autonomous navigation in large-scale and complex environments in the absence of a GPS signal is a fundamental challenge encountered in a variety of applications. Since 3-D scans provide inherent robustness to ambient illumination changes and the type of the surface texture, we present Point Cloud Map-based Navigation (PCMN), a robust robot navigation system, based exclusively on 3-D point cloud registration between an acquired observation and a stored reference map. It provides a drift-free navigation solution, equipped with a failed registration detection capability. The backbone of the navigation system is a robust point cloud registration method, of the acquired observation to the stored reference map. The proposed registration algorithm follows a hypotheses generation and evaluation paradigm, where multiple statistically independent hypotheses are generated from local neighborhoods of putative matching points. Then, hypotheses are evaluated using a multiple consensus analysis that integrates evaluation of the point cloud feature correlation and a consensus test on the Special Euclidean Group SE(3) based on independent hypothesized estimates. The proposed PCMN is shown to achieve significantly better performance than state-of-the-art methods, both in terms of place recognition recall and localization accuracy, achieving submesh resolution accuracy, both for indoor and outdoor settings.</p>","PeriodicalId":11816,"journal":{"name":"EURASIP Journal on Advances in Signal Processing","volume":"25 1","pages":""},"PeriodicalIF":1.9000,"publicationDate":"2024-04-30","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Robust point cloud registration for map-based autonomous robot navigation\",\"authors\":\"Amit Efraim, Joseph M. Francos\",\"doi\":\"10.1186/s13634-024-01153-z\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Autonomous navigation in large-scale and complex environments in the absence of a GPS signal is a fundamental challenge encountered in a variety of applications. Since 3-D scans provide inherent robustness to ambient illumination changes and the type of the surface texture, we present Point Cloud Map-based Navigation (PCMN), a robust robot navigation system, based exclusively on 3-D point cloud registration between an acquired observation and a stored reference map. It provides a drift-free navigation solution, equipped with a failed registration detection capability. The backbone of the navigation system is a robust point cloud registration method, of the acquired observation to the stored reference map. The proposed registration algorithm follows a hypotheses generation and evaluation paradigm, where multiple statistically independent hypotheses are generated from local neighborhoods of putative matching points. Then, hypotheses are evaluated using a multiple consensus analysis that integrates evaluation of the point cloud feature correlation and a consensus test on the Special Euclidean Group SE(3) based on independent hypothesized estimates. The proposed PCMN is shown to achieve significantly better performance than state-of-the-art methods, both in terms of place recognition recall and localization accuracy, achieving submesh resolution accuracy, both for indoor and outdoor settings.</p>\",\"PeriodicalId\":11816,\"journal\":{\"name\":\"EURASIP Journal on Advances in Signal Processing\",\"volume\":\"25 1\",\"pages\":\"\"},\"PeriodicalIF\":1.9000,\"publicationDate\":\"2024-04-30\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"EURASIP Journal on Advances in Signal Processing\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1186/s13634-024-01153-z\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"Engineering\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"EURASIP Journal on Advances in Signal Processing","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1186/s13634-024-01153-z","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"Engineering","Score":null,"Total":0}
Robust point cloud registration for map-based autonomous robot navigation
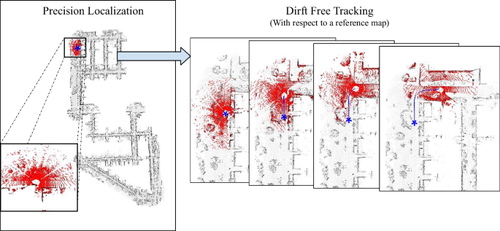
Autonomous navigation in large-scale and complex environments in the absence of a GPS signal is a fundamental challenge encountered in a variety of applications. Since 3-D scans provide inherent robustness to ambient illumination changes and the type of the surface texture, we present Point Cloud Map-based Navigation (PCMN), a robust robot navigation system, based exclusively on 3-D point cloud registration between an acquired observation and a stored reference map. It provides a drift-free navigation solution, equipped with a failed registration detection capability. The backbone of the navigation system is a robust point cloud registration method, of the acquired observation to the stored reference map. The proposed registration algorithm follows a hypotheses generation and evaluation paradigm, where multiple statistically independent hypotheses are generated from local neighborhoods of putative matching points. Then, hypotheses are evaluated using a multiple consensus analysis that integrates evaluation of the point cloud feature correlation and a consensus test on the Special Euclidean Group SE(3) based on independent hypothesized estimates. The proposed PCMN is shown to achieve significantly better performance than state-of-the-art methods, both in terms of place recognition recall and localization accuracy, achieving submesh resolution accuracy, both for indoor and outdoor settings.
期刊介绍:
The aim of the EURASIP Journal on Advances in Signal Processing is to highlight the theoretical and practical aspects of signal processing in new and emerging technologies. The journal is directed as much at the practicing engineer as at the academic researcher. Authors of articles with novel contributions to the theory and/or practice of signal processing are welcome to submit their articles for consideration.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


