{"title":"动态调制多任务优先级,控制冗余不足的机器人","authors":"Lu Chen, Yue Wang, Rong Xiong","doi":"10.1007/s11370-024-00533-6","DOIUrl":null,"url":null,"abstract":"<p>Redundant robots are gaining popularity for their agility in service tasks, but they struggle with managing multiple tasks in dynamic and unstructured environments. Research is currently centered around adjusting task priorities to facilitate the robot’s adaptability to different situational demands. This paper addresses the challenge of automated task prioritization in multi-task handling and presents a solution for robots to effectively execute demanding tasks, even when faced with limited redundancy and multiple constraints. We introduce the concept of <i>secondary merged tasks</i> and formulate task merging as a matrix design problem. An iterative updating algorithm based on real-time task status is proposed to enable automatic prioritization and dynamic adjustment of tasks. This methodology ensures appropriate execution of all tasks at the right time. We analyze the convergence of weight transfer between redundancies and task dependencies, ensuring stable task execution. Simulation experiments and real-world experiments using 9-DOF mobile manipulator and 6-DOF fixed manipulator are conducted to validate the proposed method. This research provides a feasible approach for task prioritization in multi-task handling and holds potential applications.</p>","PeriodicalId":48813,"journal":{"name":"Intelligent Service Robotics","volume":"57 1","pages":""},"PeriodicalIF":4.3000,"publicationDate":"2024-04-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Dynamic modulation of multi-task priority for controlling redundancy insufficient robots\",\"authors\":\"Lu Chen, Yue Wang, Rong Xiong\",\"doi\":\"10.1007/s11370-024-00533-6\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Redundant robots are gaining popularity for their agility in service tasks, but they struggle with managing multiple tasks in dynamic and unstructured environments. Research is currently centered around adjusting task priorities to facilitate the robot’s adaptability to different situational demands. This paper addresses the challenge of automated task prioritization in multi-task handling and presents a solution for robots to effectively execute demanding tasks, even when faced with limited redundancy and multiple constraints. We introduce the concept of <i>secondary merged tasks</i> and formulate task merging as a matrix design problem. An iterative updating algorithm based on real-time task status is proposed to enable automatic prioritization and dynamic adjustment of tasks. This methodology ensures appropriate execution of all tasks at the right time. We analyze the convergence of weight transfer between redundancies and task dependencies, ensuring stable task execution. Simulation experiments and real-world experiments using 9-DOF mobile manipulator and 6-DOF fixed manipulator are conducted to validate the proposed method. This research provides a feasible approach for task prioritization in multi-task handling and holds potential applications.</p>\",\"PeriodicalId\":48813,\"journal\":{\"name\":\"Intelligent Service Robotics\",\"volume\":\"57 1\",\"pages\":\"\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2024-04-09\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Intelligent Service Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s11370-024-00533-6\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Intelligent Service Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s11370-024-00533-6","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ROBOTICS","Score":null,"Total":0}
Dynamic modulation of multi-task priority for controlling redundancy insufficient robots
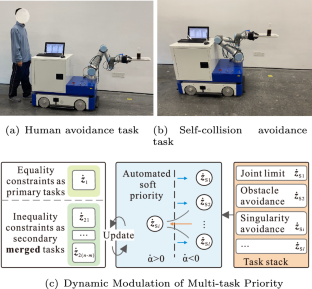
Redundant robots are gaining popularity for their agility in service tasks, but they struggle with managing multiple tasks in dynamic and unstructured environments. Research is currently centered around adjusting task priorities to facilitate the robot’s adaptability to different situational demands. This paper addresses the challenge of automated task prioritization in multi-task handling and presents a solution for robots to effectively execute demanding tasks, even when faced with limited redundancy and multiple constraints. We introduce the concept of secondary merged tasks and formulate task merging as a matrix design problem. An iterative updating algorithm based on real-time task status is proposed to enable automatic prioritization and dynamic adjustment of tasks. This methodology ensures appropriate execution of all tasks at the right time. We analyze the convergence of weight transfer between redundancies and task dependencies, ensuring stable task execution. Simulation experiments and real-world experiments using 9-DOF mobile manipulator and 6-DOF fixed manipulator are conducted to validate the proposed method. This research provides a feasible approach for task prioritization in multi-task handling and holds potential applications.
期刊介绍:
The journal directs special attention to the emerging significance of integrating robotics with information technology and cognitive science (such as ubiquitous and adaptive computing,information integration in a distributed environment, and cognitive modelling for human-robot interaction), which spurs innovation toward a new multi-dimensional robotic service to humans. The journal intends to capture and archive this emerging yet significant advancement in the field of intelligent service robotics. The journal will publish original papers of innovative ideas and concepts, new discoveries and improvements, as well as novel applications and business models which are related to the field of intelligent service robotics described above and are proven to be of high quality. The areas that the Journal will cover include, but are not limited to: Intelligent robots serving humans in daily life or in a hazardous environment, such as home or personal service robots, entertainment robots, education robots, medical robots, healthcare and rehabilitation robots, and rescue robots (Service Robotics); Intelligent robotic functions in the form of embedded systems for applications to, for example, intelligent space, intelligent vehicles and transportation systems, intelligent manufacturing systems, and intelligent medical facilities (Embedded Robotics); The integration of robotics with network technologies, generating such services and solutions as distributed robots, distance robotic education-aides, and virtual laboratories or museums (Networked Robotics).

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


