{"title":"利用改进的 U-net 神经网络进行月球地面分段","authors":"Georgios Petrakis, Panagiotis Partsinevelos","doi":"10.1007/s00138-024-01533-3","DOIUrl":null,"url":null,"abstract":"<p>Semantic segmentation plays a significant role in unstructured and planetary scene understanding, offering to a robotic system or a planetary rover valuable knowledge about its surroundings. Several studies investigate rover-based scene recognition planetary-like environments but there is a lack of a semantic segmentation architecture, focused on computing systems with low resources and tested on the lunar surface. In this study, a lightweight encoder-decoder neural network (NN) architecture is proposed for rover-based ground segmentation on the lunar surface. The proposed architecture is composed by a modified MobilenetV2 as encoder and a lightweight U-net decoder while the training and evaluation process were conducted using a publicly available synthetic dataset with lunar landscape images. The proposed model provides robust segmentation results, allowing the lunar scene understanding focused on rocks and boulders. It achieves similar accuracy, compared with original U-net and U-net-based architectures which are 110–140 times larger than the proposed architecture. This study, aims to contribute in lunar landscape segmentation utilizing deep learning techniques, while it proves a great potential in autonomous lunar navigation ensuring a safer and smoother navigation on the moon. To the best of our knowledge, this is the first study which propose a lightweight semantic segmentation architecture for the lunar surface, aiming to reinforce the autonomous rover navigation.</p>","PeriodicalId":51116,"journal":{"name":"Machine Vision and Applications","volume":"65 1","pages":""},"PeriodicalIF":2.3000,"publicationDate":"2024-04-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Lunar ground segmentation using a modified U-net neural network\",\"authors\":\"Georgios Petrakis, Panagiotis Partsinevelos\",\"doi\":\"10.1007/s00138-024-01533-3\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Semantic segmentation plays a significant role in unstructured and planetary scene understanding, offering to a robotic system or a planetary rover valuable knowledge about its surroundings. Several studies investigate rover-based scene recognition planetary-like environments but there is a lack of a semantic segmentation architecture, focused on computing systems with low resources and tested on the lunar surface. In this study, a lightweight encoder-decoder neural network (NN) architecture is proposed for rover-based ground segmentation on the lunar surface. The proposed architecture is composed by a modified MobilenetV2 as encoder and a lightweight U-net decoder while the training and evaluation process were conducted using a publicly available synthetic dataset with lunar landscape images. The proposed model provides robust segmentation results, allowing the lunar scene understanding focused on rocks and boulders. It achieves similar accuracy, compared with original U-net and U-net-based architectures which are 110–140 times larger than the proposed architecture. This study, aims to contribute in lunar landscape segmentation utilizing deep learning techniques, while it proves a great potential in autonomous lunar navigation ensuring a safer and smoother navigation on the moon. To the best of our knowledge, this is the first study which propose a lightweight semantic segmentation architecture for the lunar surface, aiming to reinforce the autonomous rover navigation.</p>\",\"PeriodicalId\":51116,\"journal\":{\"name\":\"Machine Vision and Applications\",\"volume\":\"65 1\",\"pages\":\"\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2024-04-09\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Machine Vision and Applications\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s00138-024-01533-3\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Machine Vision and Applications","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s00138-024-01533-3","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Lunar ground segmentation using a modified U-net neural network
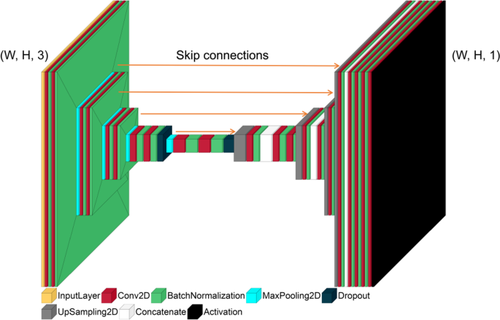
Semantic segmentation plays a significant role in unstructured and planetary scene understanding, offering to a robotic system or a planetary rover valuable knowledge about its surroundings. Several studies investigate rover-based scene recognition planetary-like environments but there is a lack of a semantic segmentation architecture, focused on computing systems with low resources and tested on the lunar surface. In this study, a lightweight encoder-decoder neural network (NN) architecture is proposed for rover-based ground segmentation on the lunar surface. The proposed architecture is composed by a modified MobilenetV2 as encoder and a lightweight U-net decoder while the training and evaluation process were conducted using a publicly available synthetic dataset with lunar landscape images. The proposed model provides robust segmentation results, allowing the lunar scene understanding focused on rocks and boulders. It achieves similar accuracy, compared with original U-net and U-net-based architectures which are 110–140 times larger than the proposed architecture. This study, aims to contribute in lunar landscape segmentation utilizing deep learning techniques, while it proves a great potential in autonomous lunar navigation ensuring a safer and smoother navigation on the moon. To the best of our knowledge, this is the first study which propose a lightweight semantic segmentation architecture for the lunar surface, aiming to reinforce the autonomous rover navigation.
期刊介绍:
Machine Vision and Applications publishes high-quality technical contributions in machine vision research and development. Specifically, the editors encourage submittals in all applications and engineering aspects of image-related computing. In particular, original contributions dealing with scientific, commercial, industrial, military, and biomedical applications of machine vision, are all within the scope of the journal.
Particular emphasis is placed on engineering and technology aspects of image processing and computer vision.
The following aspects of machine vision applications are of interest: algorithms, architectures, VLSI implementations, AI techniques and expert systems for machine vision, front-end sensing, multidimensional and multisensor machine vision, real-time techniques, image databases, virtual reality and visualization. Papers must include a significant experimental validation component.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


