{"title":"基于拓扑和微分几何的机器人路径规划最新综述--第一部分:静态约束条件下的规划","authors":"Sindhu Radhakrishnan, Wail Gueaieb","doi":"10.1007/s41315-024-00330-5","DOIUrl":null,"url":null,"abstract":"<p>Autonomous robotics has permeated several industrial, research and consumer robotic applications, of which path planning is an important component. The path planning algorithm of choice is influenced by the application at hand and the history of algorithms used for such applications. The latter is dependent on an extensive conglomeration and classification of path planning literature, which is what this work focuses on. Specifically, we accomplish the following: typical classifications of path planning algorithms are provided. Such classifications rely on differences in knowledge of the environment (known/unknown), robot (model-specific/generic), and constraints (static/dynamic). This classification however, is not comprehensive. Thus, as a resolution, we propose a detailed taxonomy based on a fundamental parameter of the space, i.e. its ability to be characterized as a set of disjoint or connected points. We show that this taxonomy encompasses important attributes of path planning problems, such as connectivity and partitioning of spaces. Consequently, path planning spaces in robotics may be viewed as simply a set of points, or as manifolds. The former can further be divided into unpartitioned and partitioned spaces, of which the former uses variants of sampling algorithms, optimization algorithms, model predictive controls, and evolutionary algorithms, while the latter uses cell decomposition and graph traversal, and sampling-based optimization techniques.This article achieves the following two goals: The first is the introduction of an all-encompassing taxonomy of robotic path planning. The second is to streamline the migration of path planning work from disciplines such as mathematics and computer vision to robotics, into one comprehensive survey. Thus, the main contribution of this work is the review of works for static constraints that fall under the proposed taxonomy, i.e., specifically under topology and manifold-based methods. Additionally, further taxonomy is introduced for manifold-based path planning, based on incremental construction or one-step explicit parametrization of the space.</p>","PeriodicalId":44563,"journal":{"name":"International Journal of Intelligent Robotics and Applications","volume":"14 1","pages":""},"PeriodicalIF":2.0000,"publicationDate":"2024-03-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"A state-of-the-art review on topology and differential geometry-based robotic path planning—part I: planning under static constraints\",\"authors\":\"Sindhu Radhakrishnan, Wail Gueaieb\",\"doi\":\"10.1007/s41315-024-00330-5\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Autonomous robotics has permeated several industrial, research and consumer robotic applications, of which path planning is an important component. The path planning algorithm of choice is influenced by the application at hand and the history of algorithms used for such applications. The latter is dependent on an extensive conglomeration and classification of path planning literature, which is what this work focuses on. Specifically, we accomplish the following: typical classifications of path planning algorithms are provided. Such classifications rely on differences in knowledge of the environment (known/unknown), robot (model-specific/generic), and constraints (static/dynamic). This classification however, is not comprehensive. Thus, as a resolution, we propose a detailed taxonomy based on a fundamental parameter of the space, i.e. its ability to be characterized as a set of disjoint or connected points. We show that this taxonomy encompasses important attributes of path planning problems, such as connectivity and partitioning of spaces. Consequently, path planning spaces in robotics may be viewed as simply a set of points, or as manifolds. The former can further be divided into unpartitioned and partitioned spaces, of which the former uses variants of sampling algorithms, optimization algorithms, model predictive controls, and evolutionary algorithms, while the latter uses cell decomposition and graph traversal, and sampling-based optimization techniques.This article achieves the following two goals: The first is the introduction of an all-encompassing taxonomy of robotic path planning. The second is to streamline the migration of path planning work from disciplines such as mathematics and computer vision to robotics, into one comprehensive survey. Thus, the main contribution of this work is the review of works for static constraints that fall under the proposed taxonomy, i.e., specifically under topology and manifold-based methods. Additionally, further taxonomy is introduced for manifold-based path planning, based on incremental construction or one-step explicit parametrization of the space.</p>\",\"PeriodicalId\":44563,\"journal\":{\"name\":\"International Journal of Intelligent Robotics and Applications\",\"volume\":\"14 1\",\"pages\":\"\"},\"PeriodicalIF\":2.0000,\"publicationDate\":\"2024-03-20\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Intelligent Robotics and Applications\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1007/s41315-024-00330-5\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Intelligent Robotics and Applications","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s41315-024-00330-5","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ROBOTICS","Score":null,"Total":0}
A state-of-the-art review on topology and differential geometry-based robotic path planning—part I: planning under static constraints
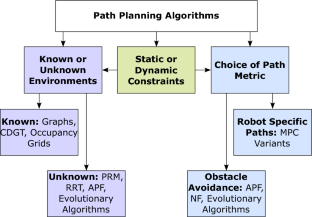
Autonomous robotics has permeated several industrial, research and consumer robotic applications, of which path planning is an important component. The path planning algorithm of choice is influenced by the application at hand and the history of algorithms used for such applications. The latter is dependent on an extensive conglomeration and classification of path planning literature, which is what this work focuses on. Specifically, we accomplish the following: typical classifications of path planning algorithms are provided. Such classifications rely on differences in knowledge of the environment (known/unknown), robot (model-specific/generic), and constraints (static/dynamic). This classification however, is not comprehensive. Thus, as a resolution, we propose a detailed taxonomy based on a fundamental parameter of the space, i.e. its ability to be characterized as a set of disjoint or connected points. We show that this taxonomy encompasses important attributes of path planning problems, such as connectivity and partitioning of spaces. Consequently, path planning spaces in robotics may be viewed as simply a set of points, or as manifolds. The former can further be divided into unpartitioned and partitioned spaces, of which the former uses variants of sampling algorithms, optimization algorithms, model predictive controls, and evolutionary algorithms, while the latter uses cell decomposition and graph traversal, and sampling-based optimization techniques.This article achieves the following two goals: The first is the introduction of an all-encompassing taxonomy of robotic path planning. The second is to streamline the migration of path planning work from disciplines such as mathematics and computer vision to robotics, into one comprehensive survey. Thus, the main contribution of this work is the review of works for static constraints that fall under the proposed taxonomy, i.e., specifically under topology and manifold-based methods. Additionally, further taxonomy is introduced for manifold-based path planning, based on incremental construction or one-step explicit parametrization of the space.
期刊介绍:
The International Journal of Intelligent Robotics and Applications (IJIRA) fosters the dissemination of new discoveries and novel technologies that advance developments in robotics and their broad applications. This journal provides a publication and communication platform for all robotics topics, from the theoretical fundamentals and technological advances to various applications including manufacturing, space vehicles, biomedical systems and automobiles, data-storage devices, healthcare systems, home appliances, and intelligent highways. IJIRA welcomes contributions from researchers, professionals and industrial practitioners. It publishes original, high-quality and previously unpublished research papers, brief reports, and critical reviews. Specific areas of interest include, but are not limited to:Advanced actuators and sensorsCollective and social robots Computing, communication and controlDesign, modeling and prototypingHuman and robot interactionMachine learning and intelligenceMobile robots and intelligent autonomous systemsMulti-sensor fusion and perceptionPlanning, navigation and localizationRobot intelligence, learning and linguisticsRobotic vision, recognition and reconstructionBio-mechatronics and roboticsCloud and Swarm roboticsCognitive and neuro roboticsExploration and security roboticsHealthcare, medical and assistive roboticsRobotics for intelligent manufacturingService, social and entertainment roboticsSpace and underwater robotsNovel and emerging applications

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


