Seyyed Masoud Kargar, Alberto Parmiggiani, Mario Baggetta, Emilio Ottonello, Guangbo Hao, Giovanni Berselli
{"title":"通过计算机辅助工程工具优化四面体顺应性球形接头","authors":"Seyyed Masoud Kargar, Alberto Parmiggiani, Mario Baggetta, Emilio Ottonello, Guangbo Hao, Giovanni Berselli","doi":"10.1007/s00170-024-13314-3","DOIUrl":null,"url":null,"abstract":"<p>This article focuses on enhancing the range of motion (ROM) of the Tetra II joint, a spherical compliant joint consisting of three internally interconnected tetrahedron-shaped elements that achieve motion through elastic deformation. Despite its excellent precision, this specific design is constrained in terms of ROM due to internal contacts among the tetrahedral elements. To overcome this limitation, this study utilizes a computer-aided engineering (CAE) framework to optimize the configuration of the Tetra II joint and enhance its ROM. The resultant optimized joint, referred to as Tetra III, is subsequently compared to Tetra II in terms of both ROM and center shift. Finite element models (FEM) are employed to validate the optimization results and examine how various tetrahedron-shaped geometries impact the joint’s performance. The newly optimized joint exhibits a significantly higher ROM compared to the previous version, while maintaining excellent precision and overall smaller dimensions. Finally, to demonstrate its manufacturability, the Tetra III joint is produced using selective laser sintering (SLS) technology, with Duraform PA serving as the construction material. The successful fabrication serves as a demonstrative example of the improved design of the Tetra III joint.</p>","PeriodicalId":50345,"journal":{"name":"International Journal of Advanced Manufacturing Technology","volume":"40 1","pages":""},"PeriodicalIF":3.1000,"publicationDate":"2024-03-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Optimization of a tetrahedron compliant spherical joint via computer-aided engineering tools\",\"authors\":\"Seyyed Masoud Kargar, Alberto Parmiggiani, Mario Baggetta, Emilio Ottonello, Guangbo Hao, Giovanni Berselli\",\"doi\":\"10.1007/s00170-024-13314-3\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>This article focuses on enhancing the range of motion (ROM) of the Tetra II joint, a spherical compliant joint consisting of three internally interconnected tetrahedron-shaped elements that achieve motion through elastic deformation. Despite its excellent precision, this specific design is constrained in terms of ROM due to internal contacts among the tetrahedral elements. To overcome this limitation, this study utilizes a computer-aided engineering (CAE) framework to optimize the configuration of the Tetra II joint and enhance its ROM. The resultant optimized joint, referred to as Tetra III, is subsequently compared to Tetra II in terms of both ROM and center shift. Finite element models (FEM) are employed to validate the optimization results and examine how various tetrahedron-shaped geometries impact the joint’s performance. The newly optimized joint exhibits a significantly higher ROM compared to the previous version, while maintaining excellent precision and overall smaller dimensions. Finally, to demonstrate its manufacturability, the Tetra III joint is produced using selective laser sintering (SLS) technology, with Duraform PA serving as the construction material. The successful fabrication serves as a demonstrative example of the improved design of the Tetra III joint.</p>\",\"PeriodicalId\":50345,\"journal\":{\"name\":\"International Journal of Advanced Manufacturing Technology\",\"volume\":\"40 1\",\"pages\":\"\"},\"PeriodicalIF\":3.1000,\"publicationDate\":\"2024-03-19\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Advanced Manufacturing Technology\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s00170-024-13314-3\",\"RegionNum\":3,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Advanced Manufacturing Technology","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s00170-024-13314-3","RegionNum":3,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
摘要
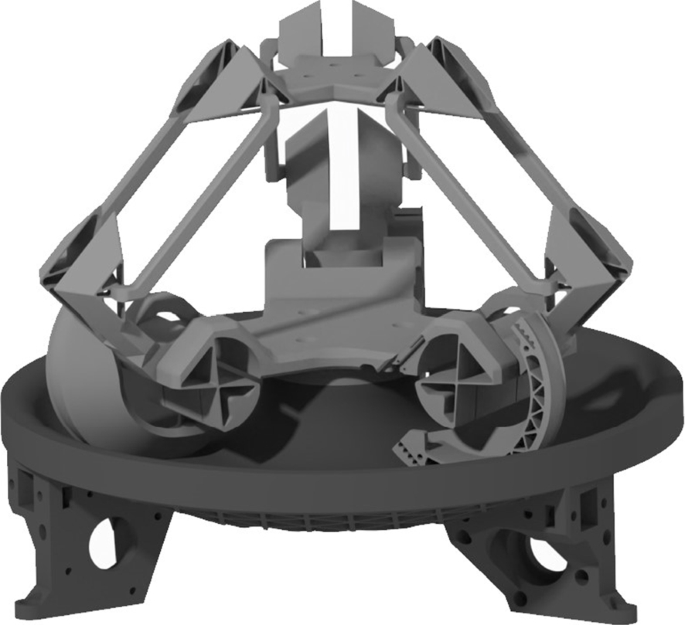
Tetra II 关节是一种球形顺应性关节,由三个内部相互连接的四面体元件组成,通过弹性变形实现运动。尽管其精度极高,但由于四面体元件之间存在内部接触,这种特殊设计在 ROM 方面受到限制。为了克服这一限制,本研究利用计算机辅助工程(CAE)框架来优化 Tetra II 接头的配置,并提高其 ROM。优化后的关节(称为 Tetra III)在 ROM 和中心偏移方面与 Tetra II 进行了比较。采用有限元模型(FEM)来验证优化结果,并研究各种四面体几何形状对关节性能的影响。与之前的版本相比,新优化的关节显示出更高的 ROM,同时保持了出色的精度和更小的整体尺寸。最后,为了证明其可制造性,Tetra III 接头采用选择性激光烧结(SLS)技术制造,并使用 Duraform PA 作为结构材料。成功的制造是 Tetra III 接头改进设计的一个示范实例。
Optimization of a tetrahedron compliant spherical joint via computer-aided engineering tools
This article focuses on enhancing the range of motion (ROM) of the Tetra II joint, a spherical compliant joint consisting of three internally interconnected tetrahedron-shaped elements that achieve motion through elastic deformation. Despite its excellent precision, this specific design is constrained in terms of ROM due to internal contacts among the tetrahedral elements. To overcome this limitation, this study utilizes a computer-aided engineering (CAE) framework to optimize the configuration of the Tetra II joint and enhance its ROM. The resultant optimized joint, referred to as Tetra III, is subsequently compared to Tetra II in terms of both ROM and center shift. Finite element models (FEM) are employed to validate the optimization results and examine how various tetrahedron-shaped geometries impact the joint’s performance. The newly optimized joint exhibits a significantly higher ROM compared to the previous version, while maintaining excellent precision and overall smaller dimensions. Finally, to demonstrate its manufacturability, the Tetra III joint is produced using selective laser sintering (SLS) technology, with Duraform PA serving as the construction material. The successful fabrication serves as a demonstrative example of the improved design of the Tetra III joint.
期刊介绍:
The International Journal of Advanced Manufacturing Technology bridges the gap between pure research journals and the more practical publications on advanced manufacturing and systems. It therefore provides an outstanding forum for papers covering applications-based research topics relevant to manufacturing processes, machines and process integration.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


