{"title":"基于工艺建模的机器人缝纫方法研究","authors":"Fengming Li, Dang Hou, Tianyu Fu, Jiexin Song, Wenbin He, Rui Song","doi":"10.1007/s41315-024-00326-1","DOIUrl":null,"url":null,"abstract":"<p>At present, most clothing sewing relies on manual labor, and robot sewing has become a trend. However, different clothing styles have various sewing requirements. This poses a challenge for robot sewing, and the key to solving this challenge lies in the planning of robot operation trajectories. Although the shapes of sewing components are diverse, we can decompose them into the most basic straight lines and curved edges. In order to solve the trajectory planning problem in robot sewing process, this paper divides the sewing task into two parts: straight line and curve, and proposes a new robot sewing method based on task process decomposition. Firstly, The robot complex sewing task is divided into two parts: straight line and curve. Based on the extensibility, the sewing tension is predicted, and the robot linear sewing based on impedance control is realized. At the same time, the trajectory planning is carried out on the basis of the line identification of the curved edge to realize the curve sewing. Finally, the robot complex stitch sewing under different curvatures is realized on the built physical experiment platform. It is verified that the effectiveness of the robot sewing method based on process modeling.</p>","PeriodicalId":44563,"journal":{"name":"International Journal of Intelligent Robotics and Applications","volume":"68 1","pages":""},"PeriodicalIF":2.0000,"publicationDate":"2024-03-11","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Research on robot sewing method based on process modeling\",\"authors\":\"Fengming Li, Dang Hou, Tianyu Fu, Jiexin Song, Wenbin He, Rui Song\",\"doi\":\"10.1007/s41315-024-00326-1\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>At present, most clothing sewing relies on manual labor, and robot sewing has become a trend. However, different clothing styles have various sewing requirements. This poses a challenge for robot sewing, and the key to solving this challenge lies in the planning of robot operation trajectories. Although the shapes of sewing components are diverse, we can decompose them into the most basic straight lines and curved edges. In order to solve the trajectory planning problem in robot sewing process, this paper divides the sewing task into two parts: straight line and curve, and proposes a new robot sewing method based on task process decomposition. Firstly, The robot complex sewing task is divided into two parts: straight line and curve. Based on the extensibility, the sewing tension is predicted, and the robot linear sewing based on impedance control is realized. At the same time, the trajectory planning is carried out on the basis of the line identification of the curved edge to realize the curve sewing. Finally, the robot complex stitch sewing under different curvatures is realized on the built physical experiment platform. It is verified that the effectiveness of the robot sewing method based on process modeling.</p>\",\"PeriodicalId\":44563,\"journal\":{\"name\":\"International Journal of Intelligent Robotics and Applications\",\"volume\":\"68 1\",\"pages\":\"\"},\"PeriodicalIF\":2.0000,\"publicationDate\":\"2024-03-11\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Intelligent Robotics and Applications\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1007/s41315-024-00326-1\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Intelligent Robotics and Applications","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s41315-024-00326-1","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ROBOTICS","Score":null,"Total":0}
Research on robot sewing method based on process modeling
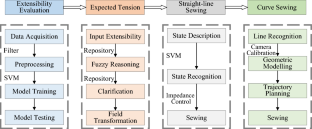
At present, most clothing sewing relies on manual labor, and robot sewing has become a trend. However, different clothing styles have various sewing requirements. This poses a challenge for robot sewing, and the key to solving this challenge lies in the planning of robot operation trajectories. Although the shapes of sewing components are diverse, we can decompose them into the most basic straight lines and curved edges. In order to solve the trajectory planning problem in robot sewing process, this paper divides the sewing task into two parts: straight line and curve, and proposes a new robot sewing method based on task process decomposition. Firstly, The robot complex sewing task is divided into two parts: straight line and curve. Based on the extensibility, the sewing tension is predicted, and the robot linear sewing based on impedance control is realized. At the same time, the trajectory planning is carried out on the basis of the line identification of the curved edge to realize the curve sewing. Finally, the robot complex stitch sewing under different curvatures is realized on the built physical experiment platform. It is verified that the effectiveness of the robot sewing method based on process modeling.
期刊介绍:
The International Journal of Intelligent Robotics and Applications (IJIRA) fosters the dissemination of new discoveries and novel technologies that advance developments in robotics and their broad applications. This journal provides a publication and communication platform for all robotics topics, from the theoretical fundamentals and technological advances to various applications including manufacturing, space vehicles, biomedical systems and automobiles, data-storage devices, healthcare systems, home appliances, and intelligent highways. IJIRA welcomes contributions from researchers, professionals and industrial practitioners. It publishes original, high-quality and previously unpublished research papers, brief reports, and critical reviews. Specific areas of interest include, but are not limited to:Advanced actuators and sensorsCollective and social robots Computing, communication and controlDesign, modeling and prototypingHuman and robot interactionMachine learning and intelligenceMobile robots and intelligent autonomous systemsMulti-sensor fusion and perceptionPlanning, navigation and localizationRobot intelligence, learning and linguisticsRobotic vision, recognition and reconstructionBio-mechatronics and roboticsCloud and Swarm roboticsCognitive and neuro roboticsExploration and security roboticsHealthcare, medical and assistive roboticsRobotics for intelligent manufacturingService, social and entertainment roboticsSpace and underwater robotsNovel and emerging applications

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


