{"title":"高效省油、安全可靠的分布式分层控制,适用于混合动力电动汽车的排队行驶","authors":"Jinghua Guo, Jingyao Wang, Ban Wang","doi":"10.1049/itr2.12505","DOIUrl":null,"url":null,"abstract":"<p>In order to enhance the performance of safety and fuel economy of connected hybrid electric vehicles (CHEVs), a novel distributed hierarchical platoon control scheme of CHEVs is proposed. First, the non-linear dynamic model of CHEVs platooning is established to accurately depict the multi-process coupling characteristics of CHEVs. Then, a distributed hierarchical control framework for CHEVs platooning is proposed, which is consisted of a upper model predictive control (MPC) law and a lower energy management control law. The upper MPC control law is built to produce the desired accelerations of every vehicle in the platoon and the lower fuzzy-based energy management control law is constructed to ensure the engine maintain at the rang of optimum working point and the motor work with the high efficiency of CHEVs platooning. Finally, the results manifest that the effectiveness of proposed platoon control scheme for CHEVs.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":"18 7","pages":"1227-1236"},"PeriodicalIF":2.3000,"publicationDate":"2024-03-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12505","citationCount":"0","resultStr":"{\"title\":\"Fuel-efficient and safe distributed hierarchical control for connected hybrid electric vehicles platooning\",\"authors\":\"Jinghua Guo, Jingyao Wang, Ban Wang\",\"doi\":\"10.1049/itr2.12505\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>In order to enhance the performance of safety and fuel economy of connected hybrid electric vehicles (CHEVs), a novel distributed hierarchical platoon control scheme of CHEVs is proposed. First, the non-linear dynamic model of CHEVs platooning is established to accurately depict the multi-process coupling characteristics of CHEVs. Then, a distributed hierarchical control framework for CHEVs platooning is proposed, which is consisted of a upper model predictive control (MPC) law and a lower energy management control law. The upper MPC control law is built to produce the desired accelerations of every vehicle in the platoon and the lower fuzzy-based energy management control law is constructed to ensure the engine maintain at the rang of optimum working point and the motor work with the high efficiency of CHEVs platooning. Finally, the results manifest that the effectiveness of proposed platoon control scheme for CHEVs.</p>\",\"PeriodicalId\":50381,\"journal\":{\"name\":\"IET Intelligent Transport Systems\",\"volume\":\"18 7\",\"pages\":\"1227-1236\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2024-03-08\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12505\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Intelligent Transport Systems\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12505\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12505","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Fuel-efficient and safe distributed hierarchical control for connected hybrid electric vehicles platooning
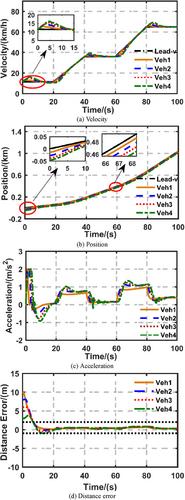
In order to enhance the performance of safety and fuel economy of connected hybrid electric vehicles (CHEVs), a novel distributed hierarchical platoon control scheme of CHEVs is proposed. First, the non-linear dynamic model of CHEVs platooning is established to accurately depict the multi-process coupling characteristics of CHEVs. Then, a distributed hierarchical control framework for CHEVs platooning is proposed, which is consisted of a upper model predictive control (MPC) law and a lower energy management control law. The upper MPC control law is built to produce the desired accelerations of every vehicle in the platoon and the lower fuzzy-based energy management control law is constructed to ensure the engine maintain at the rang of optimum working point and the motor work with the high efficiency of CHEVs platooning. Finally, the results manifest that the effectiveness of proposed platoon control scheme for CHEVs.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


