Mikael Reichler , Josef Taher , Petri Manninen , Harri Kaartinen , Juha Hyyppä , Antero Kukko
{"title":"利用深度神经网络对来自城市环境的原始多光谱激光扫描数据进行语义分割","authors":"Mikael Reichler , Josef Taher , Petri Manninen , Harri Kaartinen , Juha Hyyppä , Antero Kukko","doi":"10.1016/j.ophoto.2024.100061","DOIUrl":null,"url":null,"abstract":"<div><p>Real-time semantic segmentation of point clouds has increasing importance in applications related to 3D city modelling and mapping, automated inventory of forests, autonomous driving and mobile robotics. Current state-of-the-art point cloud semantic segmentation methods rely heavily on the availability of 3D laser scanning data. This is problematic in regards of low-latency, real-time applications that use data from high-precision mobile laser scanners, as those are typically 2D line scanning devices. In this study, we experiment with real-time semantic segmentation of high-density multispectral point clouds collected from 2D line scanners in urban environments using encoder - decoder convolutional neural network architectures. We introduce a rasterized multi-scan input format that can be constructed exclusively from the raw (non-georeferenced profiles) 2D laser scanner measurement stream without odometry information. In addition, we investigate the impact of multispectral data on the segmentation accuracy. The dataset used for training, validation and testing was collected with multispectral FGI AkhkaR4-DW backpack laser scanning system operating at the wavelengths of 905 nm and 1550 nm, and consists in total of 228 million points (39 583 scans). The data was divided into 13 classes that represent various targets in urban environments. The results show that the increased spatial context of the multi-scan format improves the segmentation performance on the single-wavelength lidar dataset from 45.4 mIoU (a single scan) to 62.1 mIoU (24 consecutive scans). In the multispectral point cloud experiments we achieved a 71 % and 28 % relative increase in the segmentation mIoU (43.5 mIoU) as compared to the purely single-wavelength reference experiments, in which we achieved 25.4 mIoU (905 nm) and 34.1 mIoU (1550 nm). Our findings show that it is possible to semantically segment 2D line scanner data with good results by combining consecutive scans without the need for odometry information. The results also serve as motivation for developing multispectral mobile laser scanning systems that can be used in challenging urban surveys.</p></div>","PeriodicalId":100730,"journal":{"name":"ISPRS Open Journal of Photogrammetry and Remote Sensing","volume":"12 ","pages":"Article 100061"},"PeriodicalIF":0.0000,"publicationDate":"2024-03-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S2667393224000048/pdfft?md5=6faf1ff37f867c363f5ed0c6399534c9&pid=1-s2.0-S2667393224000048-main.pdf","citationCount":"0","resultStr":"{\"title\":\"Semantic segmentation of raw multispectral laser scanning data from urban environments with deep neural networks\",\"authors\":\"Mikael Reichler , Josef Taher , Petri Manninen , Harri Kaartinen , Juha Hyyppä , Antero Kukko\",\"doi\":\"10.1016/j.ophoto.2024.100061\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Real-time semantic segmentation of point clouds has increasing importance in applications related to 3D city modelling and mapping, automated inventory of forests, autonomous driving and mobile robotics. Current state-of-the-art point cloud semantic segmentation methods rely heavily on the availability of 3D laser scanning data. This is problematic in regards of low-latency, real-time applications that use data from high-precision mobile laser scanners, as those are typically 2D line scanning devices. In this study, we experiment with real-time semantic segmentation of high-density multispectral point clouds collected from 2D line scanners in urban environments using encoder - decoder convolutional neural network architectures. We introduce a rasterized multi-scan input format that can be constructed exclusively from the raw (non-georeferenced profiles) 2D laser scanner measurement stream without odometry information. In addition, we investigate the impact of multispectral data on the segmentation accuracy. The dataset used for training, validation and testing was collected with multispectral FGI AkhkaR4-DW backpack laser scanning system operating at the wavelengths of 905 nm and 1550 nm, and consists in total of 228 million points (39 583 scans). The data was divided into 13 classes that represent various targets in urban environments. The results show that the increased spatial context of the multi-scan format improves the segmentation performance on the single-wavelength lidar dataset from 45.4 mIoU (a single scan) to 62.1 mIoU (24 consecutive scans). In the multispectral point cloud experiments we achieved a 71 % and 28 % relative increase in the segmentation mIoU (43.5 mIoU) as compared to the purely single-wavelength reference experiments, in which we achieved 25.4 mIoU (905 nm) and 34.1 mIoU (1550 nm). Our findings show that it is possible to semantically segment 2D line scanner data with good results by combining consecutive scans without the need for odometry information. The results also serve as motivation for developing multispectral mobile laser scanning systems that can be used in challenging urban surveys.</p></div>\",\"PeriodicalId\":100730,\"journal\":{\"name\":\"ISPRS Open Journal of Photogrammetry and Remote Sensing\",\"volume\":\"12 \",\"pages\":\"Article 100061\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2024-03-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S2667393224000048/pdfft?md5=6faf1ff37f867c363f5ed0c6399534c9&pid=1-s2.0-S2667393224000048-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"ISPRS Open Journal of Photogrammetry and Remote Sensing\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2667393224000048\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"ISPRS Open Journal of Photogrammetry and Remote Sensing","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2667393224000048","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
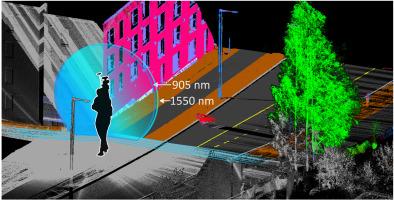
Semantic segmentation of raw multispectral laser scanning data from urban environments with deep neural networks
Real-time semantic segmentation of point clouds has increasing importance in applications related to 3D city modelling and mapping, automated inventory of forests, autonomous driving and mobile robotics. Current state-of-the-art point cloud semantic segmentation methods rely heavily on the availability of 3D laser scanning data. This is problematic in regards of low-latency, real-time applications that use data from high-precision mobile laser scanners, as those are typically 2D line scanning devices. In this study, we experiment with real-time semantic segmentation of high-density multispectral point clouds collected from 2D line scanners in urban environments using encoder - decoder convolutional neural network architectures. We introduce a rasterized multi-scan input format that can be constructed exclusively from the raw (non-georeferenced profiles) 2D laser scanner measurement stream without odometry information. In addition, we investigate the impact of multispectral data on the segmentation accuracy. The dataset used for training, validation and testing was collected with multispectral FGI AkhkaR4-DW backpack laser scanning system operating at the wavelengths of 905 nm and 1550 nm, and consists in total of 228 million points (39 583 scans). The data was divided into 13 classes that represent various targets in urban environments. The results show that the increased spatial context of the multi-scan format improves the segmentation performance on the single-wavelength lidar dataset from 45.4 mIoU (a single scan) to 62.1 mIoU (24 consecutive scans). In the multispectral point cloud experiments we achieved a 71 % and 28 % relative increase in the segmentation mIoU (43.5 mIoU) as compared to the purely single-wavelength reference experiments, in which we achieved 25.4 mIoU (905 nm) and 34.1 mIoU (1550 nm). Our findings show that it is possible to semantically segment 2D line scanner data with good results by combining consecutive scans without the need for odometry information. The results also serve as motivation for developing multispectral mobile laser scanning systems that can be used in challenging urban surveys.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


