Mohit Kumar Singh, Nicolette Formosa, Cheuk Ki Man, Craig Morton, Cansu Bahar Masera, Mohammed Quddus
{"title":"评估高速公路上的临时交通管理措施:在道路施工中为联网和自动驾驶车辆关闭车道与狭窄车道","authors":"Mohit Kumar Singh, Nicolette Formosa, Cheuk Ki Man, Craig Morton, Cansu Bahar Masera, Mohammed Quddus","doi":"10.1049/itr2.12503","DOIUrl":null,"url":null,"abstract":"<p>Connected and automated vehicles (CAVs) are being developed and designed to operate on existing roads. Their safe and efficient operation during roadworks, where traffic management measures are often introduced, is crucial. Two alternative measures are commonly applied during roadworks on motorways: (i) closing one or multiple lanes (ii) narrowing one or all lanes. The former can cause delays and increased emissions, while the latter can pose safety risks. This study uses a VISSIM-based traffic microsimulation to compare the effectiveness of these two strategies on traffic efficiency and safety, considering various market penetration rates (MPR) of CAVs. The model was calibrated and validated with the data collected from M1 motorway in the United Kingdom. Results show that average delays per vehicle-kilometre-travelled decreased from 102.7 to 2.5 s (with lane closure) and 23.6 to 0.6 s (with narrow lanes) with 0% and 100% CAV MPR, respectively. Moreover, safety in narrow lanes improved by 4.8 times compared to 1.5 times improvement in lane closure with a 100% CAV MPR; indicating that narrow lanes would result in better safety performance. These findings could assist transport authorities in designing temporary traffic management measure that results in better CAV performance when navigating through roadworks.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":"18 7","pages":"1210-1226"},"PeriodicalIF":2.3000,"publicationDate":"2024-03-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12503","citationCount":"0","resultStr":"{\"title\":\"Assessing temporary traffic management measures on a motorway: Lane closures vs narrow lanes for connected and autonomous vehicles in roadworks\",\"authors\":\"Mohit Kumar Singh, Nicolette Formosa, Cheuk Ki Man, Craig Morton, Cansu Bahar Masera, Mohammed Quddus\",\"doi\":\"10.1049/itr2.12503\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Connected and automated vehicles (CAVs) are being developed and designed to operate on existing roads. Their safe and efficient operation during roadworks, where traffic management measures are often introduced, is crucial. Two alternative measures are commonly applied during roadworks on motorways: (i) closing one or multiple lanes (ii) narrowing one or all lanes. The former can cause delays and increased emissions, while the latter can pose safety risks. This study uses a VISSIM-based traffic microsimulation to compare the effectiveness of these two strategies on traffic efficiency and safety, considering various market penetration rates (MPR) of CAVs. The model was calibrated and validated with the data collected from M1 motorway in the United Kingdom. Results show that average delays per vehicle-kilometre-travelled decreased from 102.7 to 2.5 s (with lane closure) and 23.6 to 0.6 s (with narrow lanes) with 0% and 100% CAV MPR, respectively. Moreover, safety in narrow lanes improved by 4.8 times compared to 1.5 times improvement in lane closure with a 100% CAV MPR; indicating that narrow lanes would result in better safety performance. These findings could assist transport authorities in designing temporary traffic management measure that results in better CAV performance when navigating through roadworks.</p>\",\"PeriodicalId\":50381,\"journal\":{\"name\":\"IET Intelligent Transport Systems\",\"volume\":\"18 7\",\"pages\":\"1210-1226\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2024-03-08\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12503\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Intelligent Transport Systems\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12503\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12503","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Assessing temporary traffic management measures on a motorway: Lane closures vs narrow lanes for connected and autonomous vehicles in roadworks
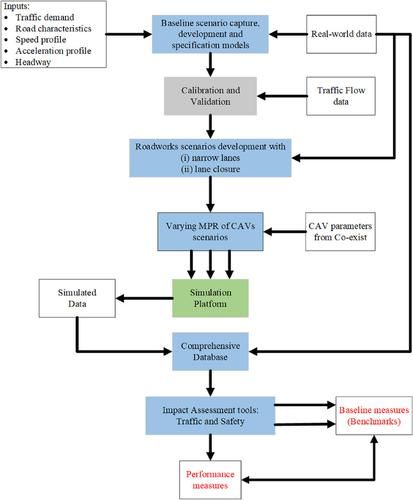
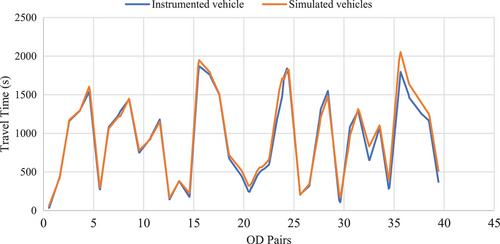
Connected and automated vehicles (CAVs) are being developed and designed to operate on existing roads. Their safe and efficient operation during roadworks, where traffic management measures are often introduced, is crucial. Two alternative measures are commonly applied during roadworks on motorways: (i) closing one or multiple lanes (ii) narrowing one or all lanes. The former can cause delays and increased emissions, while the latter can pose safety risks. This study uses a VISSIM-based traffic microsimulation to compare the effectiveness of these two strategies on traffic efficiency and safety, considering various market penetration rates (MPR) of CAVs. The model was calibrated and validated with the data collected from M1 motorway in the United Kingdom. Results show that average delays per vehicle-kilometre-travelled decreased from 102.7 to 2.5 s (with lane closure) and 23.6 to 0.6 s (with narrow lanes) with 0% and 100% CAV MPR, respectively. Moreover, safety in narrow lanes improved by 4.8 times compared to 1.5 times improvement in lane closure with a 100% CAV MPR; indicating that narrow lanes would result in better safety performance. These findings could assist transport authorities in designing temporary traffic management measure that results in better CAV performance when navigating through roadworks.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


