{"title":"基于刚度预测的医疗辅助机器人刚度适应控制研究","authors":"Chong Yao, Changle Li, Yihan Shan, Xuehe Zhang, Leifeng Zhang, Jie Zhao","doi":"10.1007/s41315-024-00321-6","DOIUrl":null,"url":null,"abstract":"<p>Predicting human stiffness, especially at the distal end of the human arm, holds significant potential for various applications. It facilitates the realization of humanoid stiffness regulation in robots, improves the adaptability and human-likeness of interactive robots, and addresses critical issues in human control of medical assistive robots. Recognizing that surface electromyographic (EMG) signals not only contain rich information but are also easy to collect and process, they serve as an optimal choice for predicting human stiffness. To establish a mapping relationship between surface EMG signals and stiffness information, we constructed a stiffness acquisition system to collect signals such as EMG, angular, force, and displacement signals. Additionally, considering the influence of different angles (configurations) of the human arm on the stiffness at the distal end, we researched a stiffness prediction model for the distal end of the human arm using a multilayer perceptron. Experimental results demonstrate that our proposed stiffness prediction model, utilizing EMG information provided by the EMG armband along with angular information, can predict the stiffness at the distal end of the human arm in various scenarios. This provides ample reference for achieving humanoid stiffness regulation in medical assistive robots.</p>","PeriodicalId":44563,"journal":{"name":"International Journal of Intelligent Robotics and Applications","volume":"50 1","pages":""},"PeriodicalIF":2.0000,"publicationDate":"2024-02-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Research on stiffness adaptation control of medical assistive robots based on stiffness prediction\",\"authors\":\"Chong Yao, Changle Li, Yihan Shan, Xuehe Zhang, Leifeng Zhang, Jie Zhao\",\"doi\":\"10.1007/s41315-024-00321-6\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Predicting human stiffness, especially at the distal end of the human arm, holds significant potential for various applications. It facilitates the realization of humanoid stiffness regulation in robots, improves the adaptability and human-likeness of interactive robots, and addresses critical issues in human control of medical assistive robots. Recognizing that surface electromyographic (EMG) signals not only contain rich information but are also easy to collect and process, they serve as an optimal choice for predicting human stiffness. To establish a mapping relationship between surface EMG signals and stiffness information, we constructed a stiffness acquisition system to collect signals such as EMG, angular, force, and displacement signals. Additionally, considering the influence of different angles (configurations) of the human arm on the stiffness at the distal end, we researched a stiffness prediction model for the distal end of the human arm using a multilayer perceptron. Experimental results demonstrate that our proposed stiffness prediction model, utilizing EMG information provided by the EMG armband along with angular information, can predict the stiffness at the distal end of the human arm in various scenarios. This provides ample reference for achieving humanoid stiffness regulation in medical assistive robots.</p>\",\"PeriodicalId\":44563,\"journal\":{\"name\":\"International Journal of Intelligent Robotics and Applications\",\"volume\":\"50 1\",\"pages\":\"\"},\"PeriodicalIF\":2.0000,\"publicationDate\":\"2024-02-27\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Intelligent Robotics and Applications\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1007/s41315-024-00321-6\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Intelligent Robotics and Applications","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s41315-024-00321-6","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ROBOTICS","Score":null,"Total":0}
Research on stiffness adaptation control of medical assistive robots based on stiffness prediction
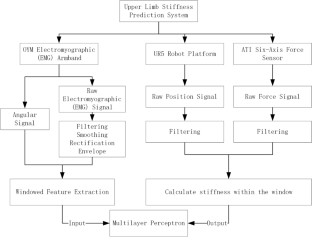
Predicting human stiffness, especially at the distal end of the human arm, holds significant potential for various applications. It facilitates the realization of humanoid stiffness regulation in robots, improves the adaptability and human-likeness of interactive robots, and addresses critical issues in human control of medical assistive robots. Recognizing that surface electromyographic (EMG) signals not only contain rich information but are also easy to collect and process, they serve as an optimal choice for predicting human stiffness. To establish a mapping relationship between surface EMG signals and stiffness information, we constructed a stiffness acquisition system to collect signals such as EMG, angular, force, and displacement signals. Additionally, considering the influence of different angles (configurations) of the human arm on the stiffness at the distal end, we researched a stiffness prediction model for the distal end of the human arm using a multilayer perceptron. Experimental results demonstrate that our proposed stiffness prediction model, utilizing EMG information provided by the EMG armband along with angular information, can predict the stiffness at the distal end of the human arm in various scenarios. This provides ample reference for achieving humanoid stiffness regulation in medical assistive robots.
期刊介绍:
The International Journal of Intelligent Robotics and Applications (IJIRA) fosters the dissemination of new discoveries and novel technologies that advance developments in robotics and their broad applications. This journal provides a publication and communication platform for all robotics topics, from the theoretical fundamentals and technological advances to various applications including manufacturing, space vehicles, biomedical systems and automobiles, data-storage devices, healthcare systems, home appliances, and intelligent highways. IJIRA welcomes contributions from researchers, professionals and industrial practitioners. It publishes original, high-quality and previously unpublished research papers, brief reports, and critical reviews. Specific areas of interest include, but are not limited to:Advanced actuators and sensorsCollective and social robots Computing, communication and controlDesign, modeling and prototypingHuman and robot interactionMachine learning and intelligenceMobile robots and intelligent autonomous systemsMulti-sensor fusion and perceptionPlanning, navigation and localizationRobot intelligence, learning and linguisticsRobotic vision, recognition and reconstructionBio-mechatronics and roboticsCloud and Swarm roboticsCognitive and neuro roboticsExploration and security roboticsHealthcare, medical and assistive roboticsRobotics for intelligent manufacturingService, social and entertainment roboticsSpace and underwater robotsNovel and emerging applications

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


