Elena Erben, Weida Liao, Antonio Minopoli, Nicola Maghelli, Eric Lauga, Moritz Kreysing
{"title":"光流体复用装配和微型机器人。","authors":"Elena Erben, Weida Liao, Antonio Minopoli, Nicola Maghelli, Eric Lauga, Moritz Kreysing","doi":"10.1038/s41377-024-01406-4","DOIUrl":null,"url":null,"abstract":"<p><p>Techniques for high-definition micromanipulations, such as optical tweezers, hold substantial interest across a wide range of disciplines. However, their applicability remains constrained by material properties and laser exposure. And while microfluidic manipulations have been suggested as an alternative, their inherent capabilities are limited and further hindered by practical challenges of implementation and control. Here we show that the iterative application of laser-induced, localized flow fields can be used for the relative positioning of multiple micro-particles, irrespectively of their material properties. Compared to the standing theoretical proposal, our method keeps particles mobile, and we show that their precision manipulation is non-linearly accelerated via the multiplexing of temperature stimuli below the heat diffusion limit. The resulting flow fields are topologically rich and mathematically predictable. They represent unprecedented microfluidic control capabilities that are illustrated by the actuation of humanoid micro-robots with up to 30 degrees of freedom, whose motions are sufficiently well-defined to reliably communicate personal characteristics such as gender, happiness and nervousness. Our results constitute high-definition micro-fluidic manipulations with transformative potential for assembly, micro-manufacturing, the life sciences, robotics and opto-hydraulically actuated micro-factories.</p>","PeriodicalId":18093,"journal":{"name":"Light, science & applications","volume":"13 1","pages":"59"},"PeriodicalIF":23.4000,"publicationDate":"2024-02-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10897173/pdf/","citationCount":"0","resultStr":"{\"title\":\"Opto-fluidically multiplexed assembly and micro-robotics.\",\"authors\":\"Elena Erben, Weida Liao, Antonio Minopoli, Nicola Maghelli, Eric Lauga, Moritz Kreysing\",\"doi\":\"10.1038/s41377-024-01406-4\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Techniques for high-definition micromanipulations, such as optical tweezers, hold substantial interest across a wide range of disciplines. However, their applicability remains constrained by material properties and laser exposure. And while microfluidic manipulations have been suggested as an alternative, their inherent capabilities are limited and further hindered by practical challenges of implementation and control. Here we show that the iterative application of laser-induced, localized flow fields can be used for the relative positioning of multiple micro-particles, irrespectively of their material properties. Compared to the standing theoretical proposal, our method keeps particles mobile, and we show that their precision manipulation is non-linearly accelerated via the multiplexing of temperature stimuli below the heat diffusion limit. The resulting flow fields are topologically rich and mathematically predictable. They represent unprecedented microfluidic control capabilities that are illustrated by the actuation of humanoid micro-robots with up to 30 degrees of freedom, whose motions are sufficiently well-defined to reliably communicate personal characteristics such as gender, happiness and nervousness. Our results constitute high-definition micro-fluidic manipulations with transformative potential for assembly, micro-manufacturing, the life sciences, robotics and opto-hydraulically actuated micro-factories.</p>\",\"PeriodicalId\":18093,\"journal\":{\"name\":\"Light, science & applications\",\"volume\":\"13 1\",\"pages\":\"59\"},\"PeriodicalIF\":23.4000,\"publicationDate\":\"2024-02-27\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10897173/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Light, science & applications\",\"FirstCategoryId\":\"101\",\"ListUrlMain\":\"https://doi.org/10.1038/s41377-024-01406-4\",\"RegionNum\":1,\"RegionCategory\":\"物理与天体物理\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"Physics and Astronomy\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Light, science & applications","FirstCategoryId":"101","ListUrlMain":"https://doi.org/10.1038/s41377-024-01406-4","RegionNum":1,"RegionCategory":"物理与天体物理","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"Physics and Astronomy","Score":null,"Total":0}
Opto-fluidically multiplexed assembly and micro-robotics.
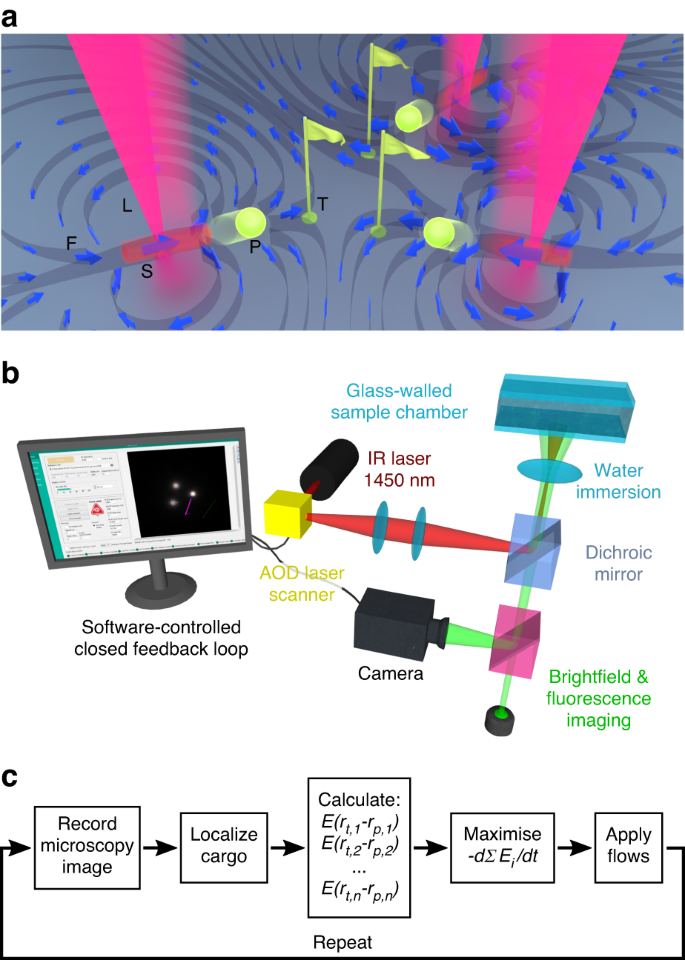
Techniques for high-definition micromanipulations, such as optical tweezers, hold substantial interest across a wide range of disciplines. However, their applicability remains constrained by material properties and laser exposure. And while microfluidic manipulations have been suggested as an alternative, their inherent capabilities are limited and further hindered by practical challenges of implementation and control. Here we show that the iterative application of laser-induced, localized flow fields can be used for the relative positioning of multiple micro-particles, irrespectively of their material properties. Compared to the standing theoretical proposal, our method keeps particles mobile, and we show that their precision manipulation is non-linearly accelerated via the multiplexing of temperature stimuli below the heat diffusion limit. The resulting flow fields are topologically rich and mathematically predictable. They represent unprecedented microfluidic control capabilities that are illustrated by the actuation of humanoid micro-robots with up to 30 degrees of freedom, whose motions are sufficiently well-defined to reliably communicate personal characteristics such as gender, happiness and nervousness. Our results constitute high-definition micro-fluidic manipulations with transformative potential for assembly, micro-manufacturing, the life sciences, robotics and opto-hydraulically actuated micro-factories.
期刊介绍:
Light: Science & Applications is an open-access, fully peer-reviewed publication.It publishes high-quality optics and photonics research globally, covering fundamental research and important issues in engineering and applied sciences related to optics and photonics.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


