{"title":"利用低成本机器人团队在 GPS 信号缺失的城市环境中进行基于地标的分布式拓扑制图和导航","authors":"Mohammad Saleh Teymouri, Subhrajit Bhattacharya","doi":"10.1007/s10458-024-09635-y","DOIUrl":null,"url":null,"abstract":"<div><p>In this paper, we address the problem of autonomous multi-robot mapping, exploration and navigation in unknown, GPS-denied indoor or urban environments using a team of robots equipped with directional sensors with limited sensing capabilities and limited computational resources. The robots have no a priori knowledge of the environment and need to rapidly explore and construct a map in a distributed manner using existing landmarks, the presence of which can be detected using onboard senors, although little to no metric information (distance or bearing to the landmarks) is available. In order to correctly and effectively achieve this, the presence of a necessary density/distribution of landmarks is ensured by design of the urban/indoor environment. We thus address this problem in two phases: (1) During the design/construction of the urban/indoor environment we can ensure that sufficient landmarks are placed within the environment. To that end we develop a <i>filtration</i>-based approach for designing strategic placement of landmarks in an environment. (2) We develop a distributed algorithm which a team of robots, with no a priori knowledge of the environment, can use to explore such an environment, construct a topological map requiring no metric/distance information, and use that map to navigate within the environment. This is achieved using a topological representation of the environment (called a <i>Landmark Complex</i>), instead of constructing a complete metric/pixel map. The representation is built by the robot as well as used by them for navigation through a balanced strategy involving exploration and exploitation. We use tools from homology theory for identifying “<i>holes</i>” in the coverage/exploration of the unknown environment and hence guide the robots towards achieving a complete exploration and mapping of the environment. Our simulation results demonstrate the effectiveness of the proposed metric-free topological (simplicial complex) representation in achieving exploration, localization and navigation within the environment.</p></div>","PeriodicalId":55586,"journal":{"name":"Autonomous Agents and Multi-Agent Systems","volume":"38 1","pages":""},"PeriodicalIF":2.6000,"publicationDate":"2024-02-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s10458-024-09635-y.pdf","citationCount":"0","resultStr":"{\"title\":\"Landmark-based distributed topological mapping and navigation in GPS-denied urban environments using teams of low-cost robots\",\"authors\":\"Mohammad Saleh Teymouri, Subhrajit Bhattacharya\",\"doi\":\"10.1007/s10458-024-09635-y\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>In this paper, we address the problem of autonomous multi-robot mapping, exploration and navigation in unknown, GPS-denied indoor or urban environments using a team of robots equipped with directional sensors with limited sensing capabilities and limited computational resources. The robots have no a priori knowledge of the environment and need to rapidly explore and construct a map in a distributed manner using existing landmarks, the presence of which can be detected using onboard senors, although little to no metric information (distance or bearing to the landmarks) is available. In order to correctly and effectively achieve this, the presence of a necessary density/distribution of landmarks is ensured by design of the urban/indoor environment. We thus address this problem in two phases: (1) During the design/construction of the urban/indoor environment we can ensure that sufficient landmarks are placed within the environment. To that end we develop a <i>filtration</i>-based approach for designing strategic placement of landmarks in an environment. (2) We develop a distributed algorithm which a team of robots, with no a priori knowledge of the environment, can use to explore such an environment, construct a topological map requiring no metric/distance information, and use that map to navigate within the environment. This is achieved using a topological representation of the environment (called a <i>Landmark Complex</i>), instead of constructing a complete metric/pixel map. The representation is built by the robot as well as used by them for navigation through a balanced strategy involving exploration and exploitation. We use tools from homology theory for identifying “<i>holes</i>” in the coverage/exploration of the unknown environment and hence guide the robots towards achieving a complete exploration and mapping of the environment. Our simulation results demonstrate the effectiveness of the proposed metric-free topological (simplicial complex) representation in achieving exploration, localization and navigation within the environment.</p></div>\",\"PeriodicalId\":55586,\"journal\":{\"name\":\"Autonomous Agents and Multi-Agent Systems\",\"volume\":\"38 1\",\"pages\":\"\"},\"PeriodicalIF\":2.6000,\"publicationDate\":\"2024-02-19\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://link.springer.com/content/pdf/10.1007/s10458-024-09635-y.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Autonomous Agents and Multi-Agent Systems\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10458-024-09635-y\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Agents and Multi-Agent Systems","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10458-024-09635-y","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Landmark-based distributed topological mapping and navigation in GPS-denied urban environments using teams of low-cost robots
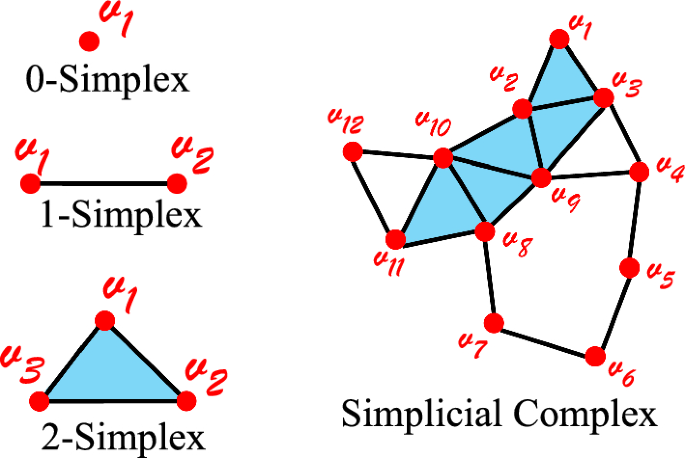
In this paper, we address the problem of autonomous multi-robot mapping, exploration and navigation in unknown, GPS-denied indoor or urban environments using a team of robots equipped with directional sensors with limited sensing capabilities and limited computational resources. The robots have no a priori knowledge of the environment and need to rapidly explore and construct a map in a distributed manner using existing landmarks, the presence of which can be detected using onboard senors, although little to no metric information (distance or bearing to the landmarks) is available. In order to correctly and effectively achieve this, the presence of a necessary density/distribution of landmarks is ensured by design of the urban/indoor environment. We thus address this problem in two phases: (1) During the design/construction of the urban/indoor environment we can ensure that sufficient landmarks are placed within the environment. To that end we develop a filtration-based approach for designing strategic placement of landmarks in an environment. (2) We develop a distributed algorithm which a team of robots, with no a priori knowledge of the environment, can use to explore such an environment, construct a topological map requiring no metric/distance information, and use that map to navigate within the environment. This is achieved using a topological representation of the environment (called a Landmark Complex), instead of constructing a complete metric/pixel map. The representation is built by the robot as well as used by them for navigation through a balanced strategy involving exploration and exploitation. We use tools from homology theory for identifying “holes” in the coverage/exploration of the unknown environment and hence guide the robots towards achieving a complete exploration and mapping of the environment. Our simulation results demonstrate the effectiveness of the proposed metric-free topological (simplicial complex) representation in achieving exploration, localization and navigation within the environment.
期刊介绍:
This is the official journal of the International Foundation for Autonomous Agents and Multi-Agent Systems. It provides a leading forum for disseminating significant original research results in the foundations, theory, development, analysis, and applications of autonomous agents and multi-agent systems. Coverage in Autonomous Agents and Multi-Agent Systems includes, but is not limited to:
Agent decision-making architectures and their evaluation, including: cognitive models; knowledge representation; logics for agency; ontological reasoning; planning (single and multi-agent); reasoning (single and multi-agent)
Cooperation and teamwork, including: distributed problem solving; human-robot/agent interaction; multi-user/multi-virtual-agent interaction; coalition formation; coordination
Agent communication languages, including: their semantics, pragmatics, and implementation; agent communication protocols and conversations; agent commitments; speech act theory
Ontologies for agent systems, agents and the semantic web, agents and semantic web services, Grid-based systems, and service-oriented computing
Agent societies and societal issues, including: artificial social systems; environments, organizations and institutions; ethical and legal issues; privacy, safety and security; trust, reliability and reputation
Agent-based system development, including: agent development techniques, tools and environments; agent programming languages; agent specification or validation languages
Agent-based simulation, including: emergent behavior; participatory simulation; simulation techniques, tools and environments; social simulation
Agreement technologies, including: argumentation; collective decision making; judgment aggregation and belief merging; negotiation; norms
Economic paradigms, including: auction and mechanism design; bargaining and negotiation; economically-motivated agents; game theory (cooperative and non-cooperative); social choice and voting
Learning agents, including: computational architectures for learning agents; evolution, adaptation; multi-agent learning.
Robotic agents, including: integrated perception, cognition, and action; cognitive robotics; robot planning (including action and motion planning); multi-robot systems.
Virtual agents, including: agents in games and virtual environments; companion and coaching agents; modeling personality, emotions; multimodal interaction; verbal and non-verbal expressiveness
Significant, novel applications of agent technology
Comprehensive reviews and authoritative tutorials of research and practice in agent systems
Comprehensive and authoritative reviews of books dealing with agents and multi-agent systems.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


