Huanlong Zhang, Panyun Wang, Zhiwu Chen, Jie Zhang, Linwei Li
{"title":"通过信用分配网络实现的目标-脱离者记忆联合跟踪算法","authors":"Huanlong Zhang, Panyun Wang, Zhiwu Chen, Jie Zhang, Linwei Li","doi":"10.1007/s00138-024-01508-4","DOIUrl":null,"url":null,"abstract":"<p>The tracking framework based on the memory network has gained significant attention due to its enhanced adaptability to variations in target appearance. However, the performance of the framework is limited by the negative effects of distractors in the background. Hence, this paper proposes a method for tracking using Credit Allocation Network to join target and distractor memory. Specifically, we design a Credit Allocation Network (CAN) that is updated online via Guided Focus Loss. The CAN produces credit scores for tracking results by learning features of the target object, ensuring the update of reliable samples for storage in the memory pool. Furthermore, we construct a multi-domain memory model that simultaneously captures target and background information from multiple historical intervals, which can build a more compatible object appearance model while increasing the diversity of the memory sample. Moreover, a novel target–distractor joint localization strategy is presented, which read target and distractor information from memory frames based on cross-attention, so as to cancel out wrong responses in the target response map by using the distractor response map. The experimental results on OTB-2015, GOT-10k, UAV123, LaSOT, and VOT-2018 datasets show the competitiveness and effectiveness of the proposed method compared to other trackers.</p>","PeriodicalId":51116,"journal":{"name":"Machine Vision and Applications","volume":"133 1","pages":""},"PeriodicalIF":2.3000,"publicationDate":"2024-02-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Target–distractor memory joint tracking algorithm via Credit Allocation Network\",\"authors\":\"Huanlong Zhang, Panyun Wang, Zhiwu Chen, Jie Zhang, Linwei Li\",\"doi\":\"10.1007/s00138-024-01508-4\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>The tracking framework based on the memory network has gained significant attention due to its enhanced adaptability to variations in target appearance. However, the performance of the framework is limited by the negative effects of distractors in the background. Hence, this paper proposes a method for tracking using Credit Allocation Network to join target and distractor memory. Specifically, we design a Credit Allocation Network (CAN) that is updated online via Guided Focus Loss. The CAN produces credit scores for tracking results by learning features of the target object, ensuring the update of reliable samples for storage in the memory pool. Furthermore, we construct a multi-domain memory model that simultaneously captures target and background information from multiple historical intervals, which can build a more compatible object appearance model while increasing the diversity of the memory sample. Moreover, a novel target–distractor joint localization strategy is presented, which read target and distractor information from memory frames based on cross-attention, so as to cancel out wrong responses in the target response map by using the distractor response map. The experimental results on OTB-2015, GOT-10k, UAV123, LaSOT, and VOT-2018 datasets show the competitiveness and effectiveness of the proposed method compared to other trackers.</p>\",\"PeriodicalId\":51116,\"journal\":{\"name\":\"Machine Vision and Applications\",\"volume\":\"133 1\",\"pages\":\"\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2024-02-09\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Machine Vision and Applications\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s00138-024-01508-4\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Machine Vision and Applications","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s00138-024-01508-4","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Target–distractor memory joint tracking algorithm via Credit Allocation Network
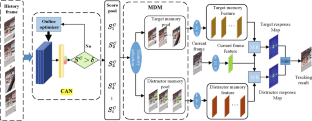
The tracking framework based on the memory network has gained significant attention due to its enhanced adaptability to variations in target appearance. However, the performance of the framework is limited by the negative effects of distractors in the background. Hence, this paper proposes a method for tracking using Credit Allocation Network to join target and distractor memory. Specifically, we design a Credit Allocation Network (CAN) that is updated online via Guided Focus Loss. The CAN produces credit scores for tracking results by learning features of the target object, ensuring the update of reliable samples for storage in the memory pool. Furthermore, we construct a multi-domain memory model that simultaneously captures target and background information from multiple historical intervals, which can build a more compatible object appearance model while increasing the diversity of the memory sample. Moreover, a novel target–distractor joint localization strategy is presented, which read target and distractor information from memory frames based on cross-attention, so as to cancel out wrong responses in the target response map by using the distractor response map. The experimental results on OTB-2015, GOT-10k, UAV123, LaSOT, and VOT-2018 datasets show the competitiveness and effectiveness of the proposed method compared to other trackers.
期刊介绍:
Machine Vision and Applications publishes high-quality technical contributions in machine vision research and development. Specifically, the editors encourage submittals in all applications and engineering aspects of image-related computing. In particular, original contributions dealing with scientific, commercial, industrial, military, and biomedical applications of machine vision, are all within the scope of the journal.
Particular emphasis is placed on engineering and technology aspects of image processing and computer vision.
The following aspects of machine vision applications are of interest: algorithms, architectures, VLSI implementations, AI techniques and expert systems for machine vision, front-end sensing, multidimensional and multisensor machine vision, real-time techniques, image databases, virtual reality and visualization. Papers must include a significant experimental validation component.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


