Han Zhang, Hongbin Liang, Lei Wang, Yiting Yao, Bin Lin, Dongmei Zhao
{"title":"基于深度强化学习算法的自动驾驶联合资源分配和安全冗余","authors":"Han Zhang, Hongbin Liang, Lei Wang, Yiting Yao, Bin Lin, Dongmei Zhao","doi":"10.1049/itr2.12489","DOIUrl":null,"url":null,"abstract":"<p>Autonomous vehicles navigating urban roads require technology that combines low latency with high computing power. The limited resources of the vehicle itself compel it to offload task requirements to edge server (ES) for processing assistance. However, as the number of vehicles continues to increase, how edge servers reasonably allocate limited resources to autonomous vehicles becomes critical to the success of urban intelligent transportation services. This paper establishes an urban road scenario with multiple autonomous vehicles and an edge computing server and considers two main driving behaviour transition resource requests, namely car-following behaviour requests and lane-changing behaviour requests. Simultaneously, acknowledging that vehicles may encounter unforeseen traffic hazards when switching driving behaviours, a safety redundancy setting strategy is employed to allocate additional resources to the vehicle to ensure safety and model the vehicle resource allocation problem in the autonomous driving system. Double-deep Q-network (DDQN) is then used to solve this model and maximize the total system utility by comprehensively considering resource costs, system revenue, and autonomous vehicle safety. Finally, results from the simulation experiment indicate that the proposed dynamic resource allocation scheme, based on deep reinforcement learning for autonomous vehicles under edge computing, not only greatly improves the system's benefits and reduces processing delays compared to traditional greedy algorithms and value iteration, but also effectively ensures security.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":null,"pages":null},"PeriodicalIF":2.3000,"publicationDate":"2024-02-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12489","citationCount":"0","resultStr":"{\"title\":\"Joint resource allocation and security redundancy for autonomous driving based on deep reinforcement learning algorithm\",\"authors\":\"Han Zhang, Hongbin Liang, Lei Wang, Yiting Yao, Bin Lin, Dongmei Zhao\",\"doi\":\"10.1049/itr2.12489\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Autonomous vehicles navigating urban roads require technology that combines low latency with high computing power. The limited resources of the vehicle itself compel it to offload task requirements to edge server (ES) for processing assistance. However, as the number of vehicles continues to increase, how edge servers reasonably allocate limited resources to autonomous vehicles becomes critical to the success of urban intelligent transportation services. This paper establishes an urban road scenario with multiple autonomous vehicles and an edge computing server and considers two main driving behaviour transition resource requests, namely car-following behaviour requests and lane-changing behaviour requests. Simultaneously, acknowledging that vehicles may encounter unforeseen traffic hazards when switching driving behaviours, a safety redundancy setting strategy is employed to allocate additional resources to the vehicle to ensure safety and model the vehicle resource allocation problem in the autonomous driving system. Double-deep Q-network (DDQN) is then used to solve this model and maximize the total system utility by comprehensively considering resource costs, system revenue, and autonomous vehicle safety. Finally, results from the simulation experiment indicate that the proposed dynamic resource allocation scheme, based on deep reinforcement learning for autonomous vehicles under edge computing, not only greatly improves the system's benefits and reduces processing delays compared to traditional greedy algorithms and value iteration, but also effectively ensures security.</p>\",\"PeriodicalId\":50381,\"journal\":{\"name\":\"IET Intelligent Transport Systems\",\"volume\":null,\"pages\":null},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2024-02-08\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12489\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Intelligent Transport Systems\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12489\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12489","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Joint resource allocation and security redundancy for autonomous driving based on deep reinforcement learning algorithm
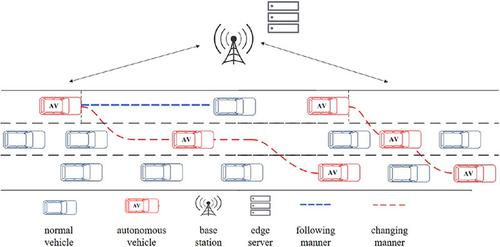
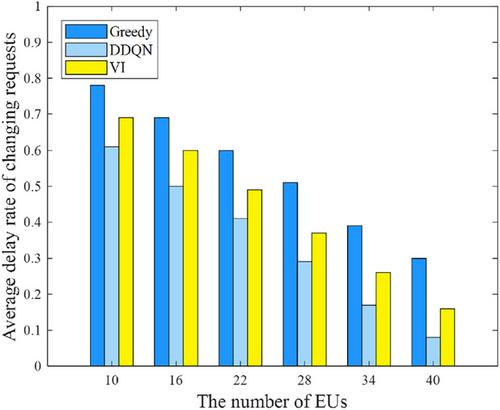
Autonomous vehicles navigating urban roads require technology that combines low latency with high computing power. The limited resources of the vehicle itself compel it to offload task requirements to edge server (ES) for processing assistance. However, as the number of vehicles continues to increase, how edge servers reasonably allocate limited resources to autonomous vehicles becomes critical to the success of urban intelligent transportation services. This paper establishes an urban road scenario with multiple autonomous vehicles and an edge computing server and considers two main driving behaviour transition resource requests, namely car-following behaviour requests and lane-changing behaviour requests. Simultaneously, acknowledging that vehicles may encounter unforeseen traffic hazards when switching driving behaviours, a safety redundancy setting strategy is employed to allocate additional resources to the vehicle to ensure safety and model the vehicle resource allocation problem in the autonomous driving system. Double-deep Q-network (DDQN) is then used to solve this model and maximize the total system utility by comprehensively considering resource costs, system revenue, and autonomous vehicle safety. Finally, results from the simulation experiment indicate that the proposed dynamic resource allocation scheme, based on deep reinforcement learning for autonomous vehicles under edge computing, not only greatly improves the system's benefits and reduces processing delays compared to traditional greedy algorithms and value iteration, but also effectively ensures security.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


