{"title":"具有推杆饱和与故障的固定时间多排机动装置","authors":"Sanjoy Mondal, Santosh Sonar, Jawhar Ghommam","doi":"10.1007/s40998-023-00668-9","DOIUrl":null,"url":null,"abstract":"<p>This paper investigates the merging and splitting maneuvers of multiple heterogeneous platoons in the presence of actuator saturation and faults. At first, the vehicles of interest are divided into separate platoons, where vehicles within each platoon synchronize within themselves. However, vehicles belonging to different platoons follow distinct target trajectories. Subsequently, a decentralized adaptive fixed-time control law is formulated to estimate the unknown faults and to compensate the impact of actuator saturation. In the proposed network, the communication exchange among vehicles of different platoons uses matrices that encode the orientation of the new platoon with respect to the other one. This makes it suitable for achieving consensus when tackling a large variety of vehicle formations. The control law guarantees that multi-leader platooning achieves fixed-time convergence even in the presence of actuator saturation, faults and external disturbances. The effectiveness of this proposed approach is demonstrated through numerical simulations.</p>","PeriodicalId":49064,"journal":{"name":"Iranian Journal of Science and Technology-Transactions of Electrical Engineering","volume":"11 1","pages":""},"PeriodicalIF":1.4000,"publicationDate":"2024-02-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"A Fixed-Time Multi-Platoon Maneuvers with Actuator Saturation and Faults\",\"authors\":\"Sanjoy Mondal, Santosh Sonar, Jawhar Ghommam\",\"doi\":\"10.1007/s40998-023-00668-9\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>This paper investigates the merging and splitting maneuvers of multiple heterogeneous platoons in the presence of actuator saturation and faults. At first, the vehicles of interest are divided into separate platoons, where vehicles within each platoon synchronize within themselves. However, vehicles belonging to different platoons follow distinct target trajectories. Subsequently, a decentralized adaptive fixed-time control law is formulated to estimate the unknown faults and to compensate the impact of actuator saturation. In the proposed network, the communication exchange among vehicles of different platoons uses matrices that encode the orientation of the new platoon with respect to the other one. This makes it suitable for achieving consensus when tackling a large variety of vehicle formations. The control law guarantees that multi-leader platooning achieves fixed-time convergence even in the presence of actuator saturation, faults and external disturbances. The effectiveness of this proposed approach is demonstrated through numerical simulations.</p>\",\"PeriodicalId\":49064,\"journal\":{\"name\":\"Iranian Journal of Science and Technology-Transactions of Electrical Engineering\",\"volume\":\"11 1\",\"pages\":\"\"},\"PeriodicalIF\":1.4000,\"publicationDate\":\"2024-02-05\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Iranian Journal of Science and Technology-Transactions of Electrical Engineering\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s40998-023-00668-9\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Iranian Journal of Science and Technology-Transactions of Electrical Engineering","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s40998-023-00668-9","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
A Fixed-Time Multi-Platoon Maneuvers with Actuator Saturation and Faults
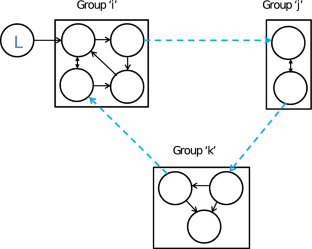
This paper investigates the merging and splitting maneuvers of multiple heterogeneous platoons in the presence of actuator saturation and faults. At first, the vehicles of interest are divided into separate platoons, where vehicles within each platoon synchronize within themselves. However, vehicles belonging to different platoons follow distinct target trajectories. Subsequently, a decentralized adaptive fixed-time control law is formulated to estimate the unknown faults and to compensate the impact of actuator saturation. In the proposed network, the communication exchange among vehicles of different platoons uses matrices that encode the orientation of the new platoon with respect to the other one. This makes it suitable for achieving consensus when tackling a large variety of vehicle formations. The control law guarantees that multi-leader platooning achieves fixed-time convergence even in the presence of actuator saturation, faults and external disturbances. The effectiveness of this proposed approach is demonstrated through numerical simulations.
期刊介绍:
Transactions of Electrical Engineering is to foster the growth of scientific research in all branches of electrical engineering and its related grounds and to provide a medium by means of which the fruits of these researches may be brought to the attentionof the world’s scientific communities.
The journal has the focus on the frontier topics in the theoretical, mathematical, numerical, experimental and scientific developments in electrical engineering as well
as applications of established techniques to new domains in various electical engineering disciplines such as:
Bio electric, Bio mechanics, Bio instrument, Microwaves, Wave Propagation, Communication Theory, Channel Estimation, radar & sonar system, Signal Processing, image processing, Artificial Neural Networks, Data Mining and Machine Learning, Fuzzy Logic and Systems, Fuzzy Control, Optimal & Robust ControlNavigation & Estimation Theory, Power Electronics & Drives, Power Generation & Management The editors will welcome papers from all professors and researchers from universities, research centers,
organizations, companies and industries from all over the world in the hope that this will advance the scientific standards of the journal and provide a channel of communication between Iranian Scholars and their colleague in other parts of the world.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


