Jesse Muhojoki , Teemu Hakala , Antero Kukko , Harri Kaartinen , Juha Hyyppä
{"title":"比较移动激光扫描系统在林冠下的定位精度","authors":"Jesse Muhojoki , Teemu Hakala , Antero Kukko , Harri Kaartinen , Juha Hyyppä","doi":"10.1016/j.srs.2024.100121","DOIUrl":null,"url":null,"abstract":"<div><p>In this paper, we compare the positioning accuracy of commercial, mobile laser scanning systems operating under a forest canopy. The accuracy was evaluated on a 800-m-long positioning track, using tree locations from both a traditional field reference, collected with total station, and a high-density airborne laser scanning (ALS) system as a reference. Tree locations were used since mobile lasers are studied for automation of field reference for forest inventory and location of individual trees with high accuracy is required. We also developed a novel method for evaluating the ground level around the trees, as it not only affects the <em>z</em>-coordinate, but the horizontal position as well if the tree is tilted.</p><p>In addition to the accuracy that could only be evaluated for systems equipped with a GNSS receiver, we evaluate the consistency of laser scanning systems by registering the tree locations extracted from the mobile systems to both the field reference and ALS. We demonstrated that the high-density ALS has similar accuracy (RMSE of approximately 6 cm) and precision as the total station field reference, while being much faster to collect. Furthermore, the completeness of the high-density ALS was over 80 %, which is more than enough to register the other methods to it in a robust manner, providing a global position for laser scanners without an inherit way of georeferencing themselves, such as a GNSS receiver.</p><p>The positioning of all the mobile systems were based on the Simultaneous Localization and Mapping (SLAM) algorithm integrated with an inertial measurement unit (IMU), and they showed a similar precision; planar positioning error of less than 15 cm and vertical error of 10–30 cm. However, the accuracy of the only commercial system in this test whose positioning methods included a GNSS receiver, was order of several meters, indicating a demand for better methods for GNSS-based global positioning inside a dense forest canopy.</p></div>","PeriodicalId":101147,"journal":{"name":"Science of Remote Sensing","volume":"9 ","pages":"Article 100121"},"PeriodicalIF":5.7000,"publicationDate":"2024-02-11","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S2666017224000051/pdfft?md5=f4b5bcf5ea7c41acc399a4c44629f862&pid=1-s2.0-S2666017224000051-main.pdf","citationCount":"0","resultStr":"{\"title\":\"Comparing positioning accuracy of mobile laser scanning systems under a forest canopy\",\"authors\":\"Jesse Muhojoki , Teemu Hakala , Antero Kukko , Harri Kaartinen , Juha Hyyppä\",\"doi\":\"10.1016/j.srs.2024.100121\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>In this paper, we compare the positioning accuracy of commercial, mobile laser scanning systems operating under a forest canopy. The accuracy was evaluated on a 800-m-long positioning track, using tree locations from both a traditional field reference, collected with total station, and a high-density airborne laser scanning (ALS) system as a reference. Tree locations were used since mobile lasers are studied for automation of field reference for forest inventory and location of individual trees with high accuracy is required. We also developed a novel method for evaluating the ground level around the trees, as it not only affects the <em>z</em>-coordinate, but the horizontal position as well if the tree is tilted.</p><p>In addition to the accuracy that could only be evaluated for systems equipped with a GNSS receiver, we evaluate the consistency of laser scanning systems by registering the tree locations extracted from the mobile systems to both the field reference and ALS. We demonstrated that the high-density ALS has similar accuracy (RMSE of approximately 6 cm) and precision as the total station field reference, while being much faster to collect. Furthermore, the completeness of the high-density ALS was over 80 %, which is more than enough to register the other methods to it in a robust manner, providing a global position for laser scanners without an inherit way of georeferencing themselves, such as a GNSS receiver.</p><p>The positioning of all the mobile systems were based on the Simultaneous Localization and Mapping (SLAM) algorithm integrated with an inertial measurement unit (IMU), and they showed a similar precision; planar positioning error of less than 15 cm and vertical error of 10–30 cm. However, the accuracy of the only commercial system in this test whose positioning methods included a GNSS receiver, was order of several meters, indicating a demand for better methods for GNSS-based global positioning inside a dense forest canopy.</p></div>\",\"PeriodicalId\":101147,\"journal\":{\"name\":\"Science of Remote Sensing\",\"volume\":\"9 \",\"pages\":\"Article 100121\"},\"PeriodicalIF\":5.7000,\"publicationDate\":\"2024-02-11\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S2666017224000051/pdfft?md5=f4b5bcf5ea7c41acc399a4c44629f862&pid=1-s2.0-S2666017224000051-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Science of Remote Sensing\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2666017224000051\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENVIRONMENTAL SCIENCES\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Science of Remote Sensing","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2666017224000051","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENVIRONMENTAL SCIENCES","Score":null,"Total":0}
引用次数: 0
摘要
本文比较了商业移动激光扫描系统在林冠下工作的定位精度。在一条 800 米长的定位轨迹上,使用全站仪采集的传统野外参照物和高密度机载激光扫描 (ALS) 系统的树木位置作为参照物,对定位精度进行了评估。使用树木位置的原因是,移动激光器被用于森林资源清查的实地参考自动化研究,并且需要高精度的单棵树木定位。我们还开发了一种新方法来评估树木周围的地平面,因为它不仅会影响 Z 坐标,如果树木倾斜,还会影响水平位置。除了只能对配备了全球导航卫星系统接收器的系统进行精度评估外,我们还通过将从移动系统中提取的树木位置注册到野外基准和 ALS 中来评估激光扫描系统的一致性。我们证明,高密度 ALS 具有与全站仪野外基准类似的精度(均方根误差约为 6 厘米)和准确度,同时采集速度更快。此外,高密度 ALS 的完整度超过 80%,足以将其他方法以稳健的方式注册到它上面,为没有固有地理参照方法(如全球导航卫星系统接收器)的激光扫描仪提供全球定位。所有移动系统的定位都基于与惯性测量单元(IMU)集成的同步定位和绘图(SLAM)算法,它们显示出相似的精度;平面定位误差小于 15 厘米,垂直误差为 10-30 厘米。然而,本次测试中唯一的商用系统的定位方法包括全球导航卫星系统(GNSS)接收器,其精度仅为几米,这表明在茂密的林冠内需要更好的基于 GNSS 的全球定位方法。
Comparing positioning accuracy of mobile laser scanning systems under a forest canopy
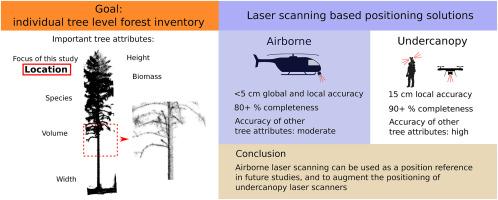
In this paper, we compare the positioning accuracy of commercial, mobile laser scanning systems operating under a forest canopy. The accuracy was evaluated on a 800-m-long positioning track, using tree locations from both a traditional field reference, collected with total station, and a high-density airborne laser scanning (ALS) system as a reference. Tree locations were used since mobile lasers are studied for automation of field reference for forest inventory and location of individual trees with high accuracy is required. We also developed a novel method for evaluating the ground level around the trees, as it not only affects the z-coordinate, but the horizontal position as well if the tree is tilted.
In addition to the accuracy that could only be evaluated for systems equipped with a GNSS receiver, we evaluate the consistency of laser scanning systems by registering the tree locations extracted from the mobile systems to both the field reference and ALS. We demonstrated that the high-density ALS has similar accuracy (RMSE of approximately 6 cm) and precision as the total station field reference, while being much faster to collect. Furthermore, the completeness of the high-density ALS was over 80 %, which is more than enough to register the other methods to it in a robust manner, providing a global position for laser scanners without an inherit way of georeferencing themselves, such as a GNSS receiver.
The positioning of all the mobile systems were based on the Simultaneous Localization and Mapping (SLAM) algorithm integrated with an inertial measurement unit (IMU), and they showed a similar precision; planar positioning error of less than 15 cm and vertical error of 10–30 cm. However, the accuracy of the only commercial system in this test whose positioning methods included a GNSS receiver, was order of several meters, indicating a demand for better methods for GNSS-based global positioning inside a dense forest canopy.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


