车辆质量变化时的鲁棒主动悬架控制
IF 0.8
Q4 ROBOTICS
引用次数: 0
摘要
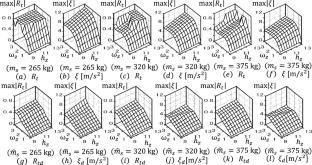
在装有主动悬架的车辆中,如果在颠簸较大的路面上使用 LQ 控制器,操控稳定性会得到很大提高,但即使在颠簸不大的路面上,乘坐舒适性也可能会下降。最近,为了避免这一问题,有人提出了一种非线性主动悬架控制方案。然而,在所提出的非线性控制器中,要求车辆质量不发生变化。实际上,车辆质量变化很大。如果车辆质量发生变化,就必须重新设计控制器。本文针对这一问题,在提出的非线性控制方案的基础上,开发了一种新的鲁棒主动悬架控制方案。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Robust active suspension control of vehicles with varying vehicle mass
In vehicles with active suspensions, if handling stability is improved strongly by using a LQ controller for a road surface such as large bumps, ride comfort may deteriorate even for a road surface such as not so large bumps. Recently, to avoid the problem, a nonlinear active suspension control scheme has been proposed. However, in the proposed nonlinear controller, it is required that vehicle mass does not vary. In practice, vehicle mass varies greatly. If vehicle mass varies, the controller has to be redesigned. In this paper, to address the problem, based on the proposed nonlinear control scheme, we develop a new robust active suspension control scheme.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Artificial Life and Robotics
ROBOTICS-
CiteScore
2.00
自引率
22.20%
发文量
101
期刊介绍:
Artificial Life and Robotics is an international journal publishing original technical papers and authoritative state-of-the-art reviews on the development of new technologies concerning artificial life and robotics, especially computer-based simulation and hardware for the twenty-first century. This journal covers a broad multidisciplinary field, including areas such as artificial brain research, artificial intelligence, artificial life, artificial living, artificial mind research, brain science, chaos, cognitive science, complexity, computer graphics, evolutionary computations, fuzzy control, genetic algorithms, innovative computations, intelligent control and modelling, micromachines, micro-robot world cup soccer tournament, mobile vehicles, neural networks, neurocomputers, neurocomputing technologies and applications, robotics, robus virtual engineering, and virtual reality. Hardware-oriented submissions are particularly welcome.
Publishing body: International Symposium on Artificial Life and RoboticsEditor-in-Chiei: Hiroshi Tanaka Hatanaka R Apartment 101, Hatanaka 8-7A, Ooaza-Hatanaka, Oita city, Oita, Japan 870-0856 ©International Symposium on Artificial Life and Robotics
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


