{"title":"利用解剖学约束条件,通过 IMU 测量改进肘关节弯曲角度的估算","authors":"Anna Bicchi, Alessandro Colombo","doi":"10.1016/j.irbm.2024.100820","DOIUrl":null,"url":null,"abstract":"<div><h3>Objectives</h3><p>Inertial Measurement Units (IMUs) are a valid alternative to optical tracking systems for human motion capture, but they are subject to several disturbances that limit their accuracy. We aim to improve the accuracy of elbow joint angle estimation from IMU measurements by introducing a novel postprocessing algorithm that uses anatomical constraints and does not require any prior calibration or knowledge of anthropometric parameters.</p></div><div><h3>Materials and Methods</h3><p>We propose a new error model that addresses sensor misalignment and fusion errors. We use an error state extended Kalman filter (ESEKF) with state constraints to integrate the anatomical constraints. We validate the proposed algorithm by testing it in different scenarios and comparing it with a state-of-the-art optical tracking system.</p></div><div><h3>Results</h3><p>The research results highlight the superior performance of the proposed method compared with existing techniques. The study demonstrates a significant reduction in errors, particularly in complex arm movements and under strong external disturbances. The results obtained in the three different tested scenarios underscore the robustness and effectiveness of the developed algorithm, reaching half the error committed by the existing calibration-free correction algorithms proposed in the literature.</p></div><div><h3>Conclusions</h3><p>The developed technique provides highly accurate estimates of joint angles in several challenging real-world scenarios.</p></div>","PeriodicalId":14605,"journal":{"name":"Irbm","volume":"45 1","pages":"Article 100820"},"PeriodicalIF":4.2000,"publicationDate":"2024-02-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S1959031824000010/pdfft?md5=4603b04f7a7d6f3268a7480f4b5a8476&pid=1-s2.0-S1959031824000010-main.pdf","citationCount":"0","resultStr":"{\"title\":\"Improved Estimation of Elbow Flexion Angle from IMU Measurements Using Anatomical Constraints\",\"authors\":\"Anna Bicchi, Alessandro Colombo\",\"doi\":\"10.1016/j.irbm.2024.100820\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><h3>Objectives</h3><p>Inertial Measurement Units (IMUs) are a valid alternative to optical tracking systems for human motion capture, but they are subject to several disturbances that limit their accuracy. We aim to improve the accuracy of elbow joint angle estimation from IMU measurements by introducing a novel postprocessing algorithm that uses anatomical constraints and does not require any prior calibration or knowledge of anthropometric parameters.</p></div><div><h3>Materials and Methods</h3><p>We propose a new error model that addresses sensor misalignment and fusion errors. We use an error state extended Kalman filter (ESEKF) with state constraints to integrate the anatomical constraints. We validate the proposed algorithm by testing it in different scenarios and comparing it with a state-of-the-art optical tracking system.</p></div><div><h3>Results</h3><p>The research results highlight the superior performance of the proposed method compared with existing techniques. The study demonstrates a significant reduction in errors, particularly in complex arm movements and under strong external disturbances. The results obtained in the three different tested scenarios underscore the robustness and effectiveness of the developed algorithm, reaching half the error committed by the existing calibration-free correction algorithms proposed in the literature.</p></div><div><h3>Conclusions</h3><p>The developed technique provides highly accurate estimates of joint angles in several challenging real-world scenarios.</p></div>\",\"PeriodicalId\":14605,\"journal\":{\"name\":\"Irbm\",\"volume\":\"45 1\",\"pages\":\"Article 100820\"},\"PeriodicalIF\":4.2000,\"publicationDate\":\"2024-02-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S1959031824000010/pdfft?md5=4603b04f7a7d6f3268a7480f4b5a8476&pid=1-s2.0-S1959031824000010-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Irbm\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S1959031824000010\",\"RegionNum\":4,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Irbm","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S1959031824000010","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
Improved Estimation of Elbow Flexion Angle from IMU Measurements Using Anatomical Constraints
Objectives
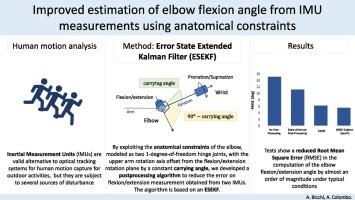
Inertial Measurement Units (IMUs) are a valid alternative to optical tracking systems for human motion capture, but they are subject to several disturbances that limit their accuracy. We aim to improve the accuracy of elbow joint angle estimation from IMU measurements by introducing a novel postprocessing algorithm that uses anatomical constraints and does not require any prior calibration or knowledge of anthropometric parameters.
Materials and Methods
We propose a new error model that addresses sensor misalignment and fusion errors. We use an error state extended Kalman filter (ESEKF) with state constraints to integrate the anatomical constraints. We validate the proposed algorithm by testing it in different scenarios and comparing it with a state-of-the-art optical tracking system.
Results
The research results highlight the superior performance of the proposed method compared with existing techniques. The study demonstrates a significant reduction in errors, particularly in complex arm movements and under strong external disturbances. The results obtained in the three different tested scenarios underscore the robustness and effectiveness of the developed algorithm, reaching half the error committed by the existing calibration-free correction algorithms proposed in the literature.
Conclusions
The developed technique provides highly accurate estimates of joint angles in several challenging real-world scenarios.
期刊介绍:
IRBM is the journal of the AGBM (Alliance for engineering in Biology an Medicine / Alliance pour le génie biologique et médical) and the SFGBM (BioMedical Engineering French Society / Société française de génie biologique médical) and the AFIB (French Association of Biomedical Engineers / Association française des ingénieurs biomédicaux).
As a vehicle of information and knowledge in the field of biomedical technologies, IRBM is devoted to fundamental as well as clinical research. Biomedical engineering and use of new technologies are the cornerstones of IRBM, providing authors and users with the latest information. Its six issues per year propose reviews (state-of-the-art and current knowledge), original articles directed at fundamental research and articles focusing on biomedical engineering. All articles are submitted to peer reviewers acting as guarantors for IRBM''s scientific and medical content. The field covered by IRBM includes all the discipline of Biomedical engineering. Thereby, the type of papers published include those that cover the technological and methodological development in:
-Physiological and Biological Signal processing (EEG, MEG, ECG…)-
Medical Image processing-
Biomechanics-
Biomaterials-
Medical Physics-
Biophysics-
Physiological and Biological Sensors-
Information technologies in healthcare-
Disability research-
Computational physiology-
…


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


