Sandro-Michael Heining, Vladislav Raykov, Oliver Wolff, Hatem Alkadhi, Hans-Christoph Pape, Guido A Wanner
{"title":"基于增强现实技术的骨盆螺钉置入手术导航:一项体外实验可行性研究。","authors":"Sandro-Michael Heining, Vladislav Raykov, Oliver Wolff, Hatem Alkadhi, Hans-Christoph Pape, Guido A Wanner","doi":"10.1186/s13037-023-00385-6","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>Minimally invasive surgical treatment of pelvic trauma requires a significant level of surgical training and technical expertise. Novel imaging and navigation technologies have always driven surgical technique, and with head-mounted displays being commercially available nowadays, the assessment of such Augmented Reality (AR) devices in a specific surgical setting is appropriate.</p><p><strong>Methods: </strong>In this ex-vivo feasibility study, an AR-based surgical navigation system was assessed in a specific clinical scenario with standard pelvic and acetabular screw pathways. The system has the following components: an optical-see-through Head Mounted Display, a specifically designed modular AR software, and surgical tool tracking using pose estimation with synthetic square markers.</p><p><strong>Results: </strong>The success rate for entry point navigation was 93.8%, the overall translational deviation of drill pathways was 3.99 ± 1.77 mm, and the overall rotational deviation of drill pathways was 4.3 ± 1.8°. There was no relevant theoretic screw perforation, as shown by 88.7% Grade 0-1 and 100% Grade 0-2 rating in our pelvic screw perforation score. Regarding screw length, 103 ± 8% of the planned pathway length could be realized successfully.</p><p><strong>Conclusion: </strong>The novel innovative system assessed in this experimental study provided proof-of-concept for the feasibility of percutaneous screw placement in the pelvis and, thus, could easily be adapted to a specific clinical scenario. The system showed comparable performance with other computer-aided solutions while providing specific advantages such as true 3D vision without intraoperative radiation; however, it needs further improvement and must still undergo regulatory body approval. Future endeavors include intraoperative registration and optimized tool tracking.</p>","PeriodicalId":46782,"journal":{"name":"Patient Safety in Surgery","volume":"18 1","pages":"3"},"PeriodicalIF":2.1000,"publicationDate":"2024-01-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10790465/pdf/","citationCount":"0","resultStr":"{\"title\":\"Augmented reality-based surgical navigation of pelvic screw placement: an ex-vivo experimental feasibility study.\",\"authors\":\"Sandro-Michael Heining, Vladislav Raykov, Oliver Wolff, Hatem Alkadhi, Hans-Christoph Pape, Guido A Wanner\",\"doi\":\"10.1186/s13037-023-00385-6\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Background: </strong>Minimally invasive surgical treatment of pelvic trauma requires a significant level of surgical training and technical expertise. Novel imaging and navigation technologies have always driven surgical technique, and with head-mounted displays being commercially available nowadays, the assessment of such Augmented Reality (AR) devices in a specific surgical setting is appropriate.</p><p><strong>Methods: </strong>In this ex-vivo feasibility study, an AR-based surgical navigation system was assessed in a specific clinical scenario with standard pelvic and acetabular screw pathways. The system has the following components: an optical-see-through Head Mounted Display, a specifically designed modular AR software, and surgical tool tracking using pose estimation with synthetic square markers.</p><p><strong>Results: </strong>The success rate for entry point navigation was 93.8%, the overall translational deviation of drill pathways was 3.99 ± 1.77 mm, and the overall rotational deviation of drill pathways was 4.3 ± 1.8°. There was no relevant theoretic screw perforation, as shown by 88.7% Grade 0-1 and 100% Grade 0-2 rating in our pelvic screw perforation score. Regarding screw length, 103 ± 8% of the planned pathway length could be realized successfully.</p><p><strong>Conclusion: </strong>The novel innovative system assessed in this experimental study provided proof-of-concept for the feasibility of percutaneous screw placement in the pelvis and, thus, could easily be adapted to a specific clinical scenario. The system showed comparable performance with other computer-aided solutions while providing specific advantages such as true 3D vision without intraoperative radiation; however, it needs further improvement and must still undergo regulatory body approval. Future endeavors include intraoperative registration and optimized tool tracking.</p>\",\"PeriodicalId\":46782,\"journal\":{\"name\":\"Patient Safety in Surgery\",\"volume\":\"18 1\",\"pages\":\"3\"},\"PeriodicalIF\":2.1000,\"publicationDate\":\"2024-01-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10790465/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Patient Safety in Surgery\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1186/s13037-023-00385-6\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"SURGERY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Patient Safety in Surgery","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1186/s13037-023-00385-6","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"SURGERY","Score":null,"Total":0}
引用次数: 0
摘要
背景:盆腔创伤的微创手术治疗需要大量的外科培训和专业技术知识。新的成像和导航技术一直在推动着外科技术的发展,如今头戴式显示器已经可以在市场上买到,因此在特定的手术环境中对这种增强现实(AR)设备进行评估是合适的:在这项体外可行性研究中,对基于 AR 的手术导航系统在标准骨盆和髋臼螺钉路径的特定临床场景中进行了评估。该系统由以下部分组成:光学透视头戴式显示器、专门设计的模块化 AR 软件以及利用合成方形标记进行姿势估计的手术工具跟踪:切入点导航的成功率为 93.8%,钻孔路径的总体平移偏差为 3.99 ± 1.77 mm,钻孔路径的总体旋转偏差为 4.3 ± 1.8°。骨盆螺钉穿孔评分中,0-1 级占 88.7%,0-2 级占 100%,因此没有相关的理论螺钉穿孔。在螺钉长度方面,103 ± 8%的计划路径长度得以成功实现:本实验研究中评估的新型创新系统为骨盆经皮螺钉置入的可行性提供了概念验证,因此很容易适应特定的临床情况。该系统的性能可与其他计算机辅助解决方案媲美,同时还具有一些特殊优势,如真正的三维视觉,且无术中辐射;不过,该系统还需要进一步改进,并且仍需获得监管机构的批准。未来的工作包括术中注册和优化工具跟踪。
Augmented reality-based surgical navigation of pelvic screw placement: an ex-vivo experimental feasibility study.
Background: Minimally invasive surgical treatment of pelvic trauma requires a significant level of surgical training and technical expertise. Novel imaging and navigation technologies have always driven surgical technique, and with head-mounted displays being commercially available nowadays, the assessment of such Augmented Reality (AR) devices in a specific surgical setting is appropriate.
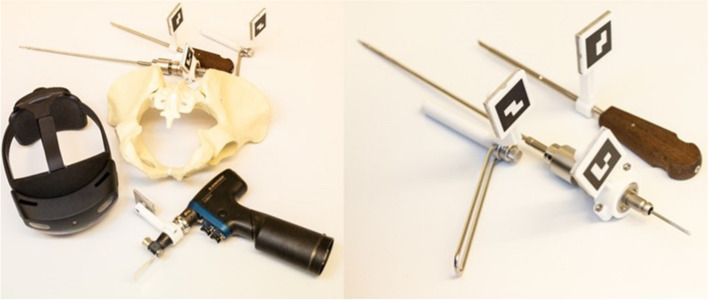
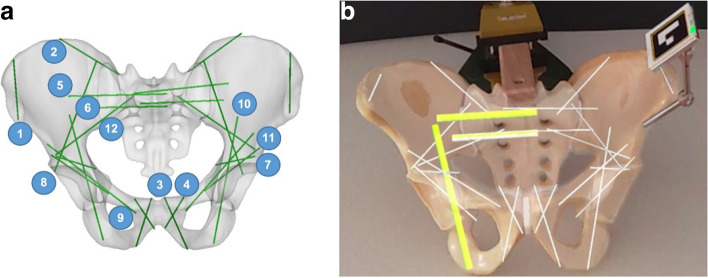
Methods: In this ex-vivo feasibility study, an AR-based surgical navigation system was assessed in a specific clinical scenario with standard pelvic and acetabular screw pathways. The system has the following components: an optical-see-through Head Mounted Display, a specifically designed modular AR software, and surgical tool tracking using pose estimation with synthetic square markers.
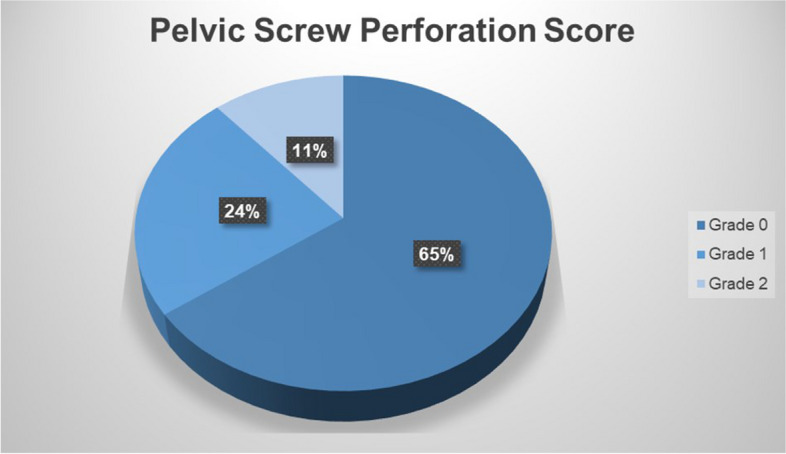
Results: The success rate for entry point navigation was 93.8%, the overall translational deviation of drill pathways was 3.99 ± 1.77 mm, and the overall rotational deviation of drill pathways was 4.3 ± 1.8°. There was no relevant theoretic screw perforation, as shown by 88.7% Grade 0-1 and 100% Grade 0-2 rating in our pelvic screw perforation score. Regarding screw length, 103 ± 8% of the planned pathway length could be realized successfully.
Conclusion: The novel innovative system assessed in this experimental study provided proof-of-concept for the feasibility of percutaneous screw placement in the pelvis and, thus, could easily be adapted to a specific clinical scenario. The system showed comparable performance with other computer-aided solutions while providing specific advantages such as true 3D vision without intraoperative radiation; however, it needs further improvement and must still undergo regulatory body approval. Future endeavors include intraoperative registration and optimized tool tracking.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


