Haifei Chi , Pinlong Cai , Daocheng Fu , Junda Zhai , Yadan Zeng , Botian Shi
{"title":"时空受限的 A* 算法作为混合流交叉口无车道交通的支持算法","authors":"Haifei Chi , Pinlong Cai , Daocheng Fu , Junda Zhai , Yadan Zeng , Botian Shi","doi":"10.1016/j.geits.2024.100159","DOIUrl":null,"url":null,"abstract":"<div><p>Improving the capacity of intersections is the key to enhancing road traffic systems. Benefiting from the application of Connected Automated Vehicles (CAVs) in the foreseeing future, it is promising to fully utilize spatiotemporal resources at intersections through cooperative and intelligent trajectory planning for CAVs. Lane-free traffic is currently a highly anticipated solution that can achieve more flexible trajectories without being limited by lane boundaries. However, it is challenging to apply efficient lane-free traffic to be compatible with the traditional intersection control mode for mixed flow composed of CAVs and Human-driving Vehicles (HVs). To address the research gap, this paper proposes a spatiotemporal-restricted A∗ algorithm to obtain efficient and flexible lane-free trajectories for CAVs. First, we restrict the feasible area of the heuristic search algorithm by considering the feasible area and orientation of vehicles to maintain the trajectory directionality of different turning behaviors. Second, we propose a spatiotemporal sparse sampling method by defining the four-dimensional spatiotemporal grid to accelerate the execution of the heuristic search algorithm. Third, we consider the motions of HVs as dynamic obstacles with rational trajectory fluctuation during the process of trajectory planning for CAVs. The proposed method can retain the advantage of efficiently exploring feasible trajectories through the hybrid A∗ algorithm, while also utilizing multiple spatiotemporal constraints to accelerate solution efficiency. The experimental results of the simulated and real scenarios with mixed flows show that the proposed model can continuously enhance traffic efficiency and fuel economy as the penetration of CAVs gradually increases.</p></div>","PeriodicalId":100596,"journal":{"name":"Green Energy and Intelligent Transportation","volume":"3 2","pages":"Article 100159"},"PeriodicalIF":16.4000,"publicationDate":"2024-04-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S2773153724000112/pdfft?md5=2c8f0d5905097a25e192b5b1df224d57&pid=1-s2.0-S2773153724000112-main.pdf","citationCount":"0","resultStr":"{\"title\":\"Spatiotemporal-restricted A∗ algorithm as a support for lane-free traffic at intersections with mixed flows\",\"authors\":\"Haifei Chi , Pinlong Cai , Daocheng Fu , Junda Zhai , Yadan Zeng , Botian Shi\",\"doi\":\"10.1016/j.geits.2024.100159\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Improving the capacity of intersections is the key to enhancing road traffic systems. Benefiting from the application of Connected Automated Vehicles (CAVs) in the foreseeing future, it is promising to fully utilize spatiotemporal resources at intersections through cooperative and intelligent trajectory planning for CAVs. Lane-free traffic is currently a highly anticipated solution that can achieve more flexible trajectories without being limited by lane boundaries. However, it is challenging to apply efficient lane-free traffic to be compatible with the traditional intersection control mode for mixed flow composed of CAVs and Human-driving Vehicles (HVs). To address the research gap, this paper proposes a spatiotemporal-restricted A∗ algorithm to obtain efficient and flexible lane-free trajectories for CAVs. First, we restrict the feasible area of the heuristic search algorithm by considering the feasible area and orientation of vehicles to maintain the trajectory directionality of different turning behaviors. Second, we propose a spatiotemporal sparse sampling method by defining the four-dimensional spatiotemporal grid to accelerate the execution of the heuristic search algorithm. Third, we consider the motions of HVs as dynamic obstacles with rational trajectory fluctuation during the process of trajectory planning for CAVs. The proposed method can retain the advantage of efficiently exploring feasible trajectories through the hybrid A∗ algorithm, while also utilizing multiple spatiotemporal constraints to accelerate solution efficiency. The experimental results of the simulated and real scenarios with mixed flows show that the proposed model can continuously enhance traffic efficiency and fuel economy as the penetration of CAVs gradually increases.</p></div>\",\"PeriodicalId\":100596,\"journal\":{\"name\":\"Green Energy and Intelligent Transportation\",\"volume\":\"3 2\",\"pages\":\"Article 100159\"},\"PeriodicalIF\":16.4000,\"publicationDate\":\"2024-04-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S2773153724000112/pdfft?md5=2c8f0d5905097a25e192b5b1df224d57&pid=1-s2.0-S2773153724000112-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Green Energy and Intelligent Transportation\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2773153724000112\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Green Energy and Intelligent Transportation","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2773153724000112","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
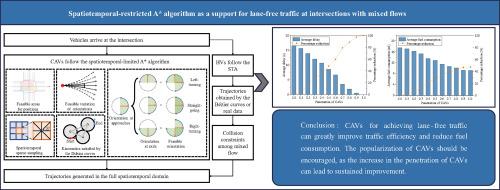
Spatiotemporal-restricted A∗ algorithm as a support for lane-free traffic at intersections with mixed flows
Improving the capacity of intersections is the key to enhancing road traffic systems. Benefiting from the application of Connected Automated Vehicles (CAVs) in the foreseeing future, it is promising to fully utilize spatiotemporal resources at intersections through cooperative and intelligent trajectory planning for CAVs. Lane-free traffic is currently a highly anticipated solution that can achieve more flexible trajectories without being limited by lane boundaries. However, it is challenging to apply efficient lane-free traffic to be compatible with the traditional intersection control mode for mixed flow composed of CAVs and Human-driving Vehicles (HVs). To address the research gap, this paper proposes a spatiotemporal-restricted A∗ algorithm to obtain efficient and flexible lane-free trajectories for CAVs. First, we restrict the feasible area of the heuristic search algorithm by considering the feasible area and orientation of vehicles to maintain the trajectory directionality of different turning behaviors. Second, we propose a spatiotemporal sparse sampling method by defining the four-dimensional spatiotemporal grid to accelerate the execution of the heuristic search algorithm. Third, we consider the motions of HVs as dynamic obstacles with rational trajectory fluctuation during the process of trajectory planning for CAVs. The proposed method can retain the advantage of efficiently exploring feasible trajectories through the hybrid A∗ algorithm, while also utilizing multiple spatiotemporal constraints to accelerate solution efficiency. The experimental results of the simulated and real scenarios with mixed flows show that the proposed model can continuously enhance traffic efficiency and fuel economy as the penetration of CAVs gradually increases.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


